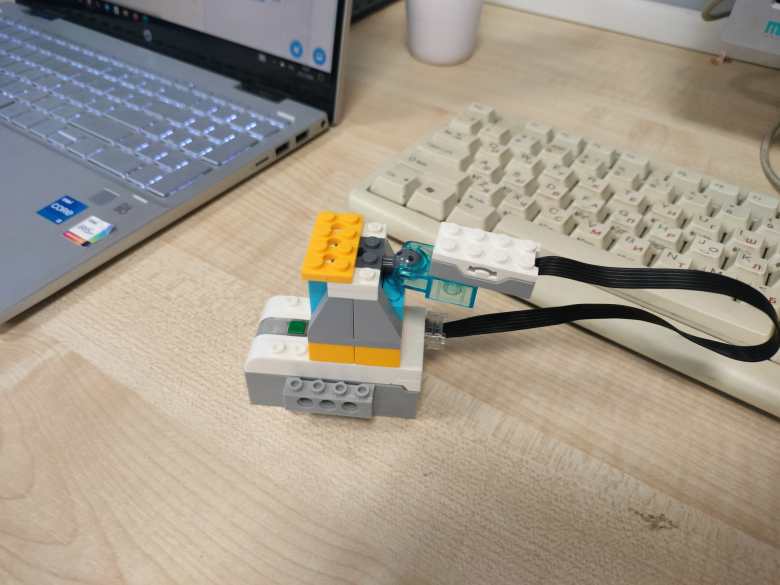
Джойстик был собран из деталей LEGO WE DO 2.0 ( с использованием датчика наклона ) Создали коннект смарт-хаба с scratch 3.0 Была написана программа и спрайт цели был запрограммирован на движение с помощью собранного "джойстика"
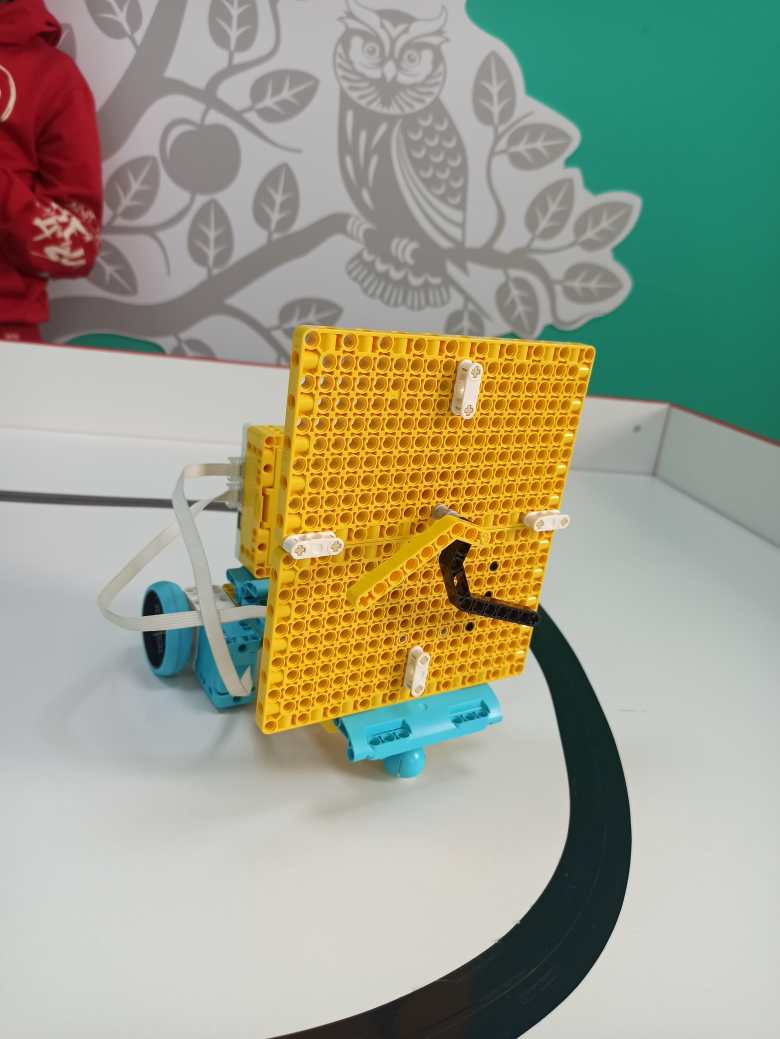
Работа Устройство захвата "цели"