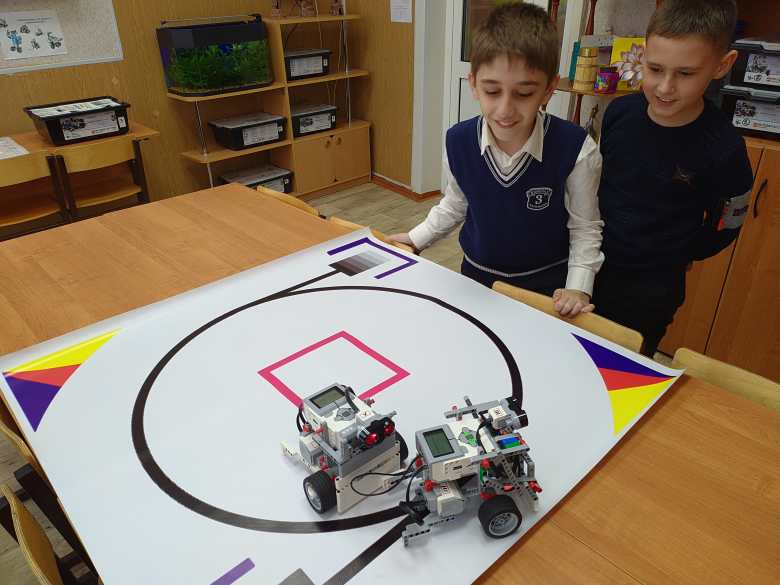
Робот при помощи датчиков цвета получает информацию, передаёт её в блок управление и осуществляет движение при помощи моторов. Созданный робот построен на базе конструктора Lego EV3. Создан для него алгоритм движения и удержания траектории движения.
Алгоритм очень простой: если датчик видит черный цвет, то робот поворачивает в одну сторону, если белый — в другую.
Реализация в среде Lego Mindstorms EV3
В обоих блоках движения выбираем режим «включить». Переключатель настраиваем на датчик цвета — измерение — цвет. В нижней части не забудьте изменить «нет цвета» на белый.
Также, необходимо правильно указать все порты.
Работа Автономный робот для ДВИЖЕНИЯ ПО ЛИНИИ