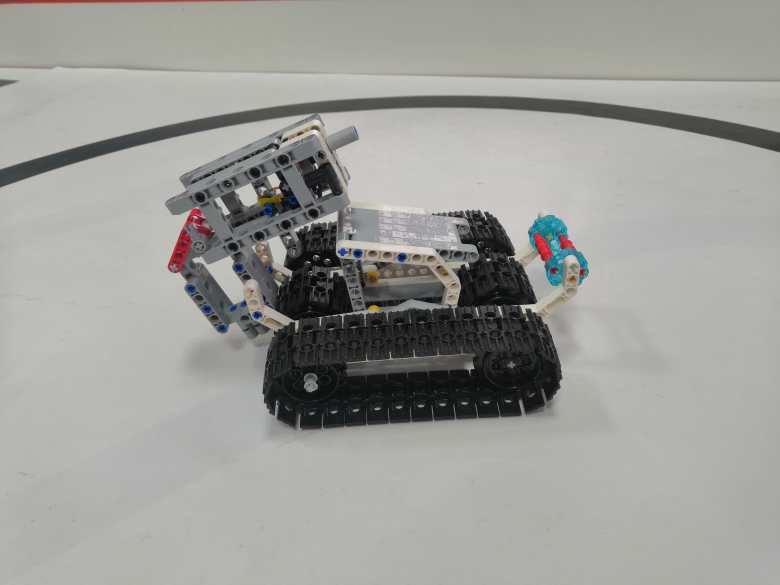
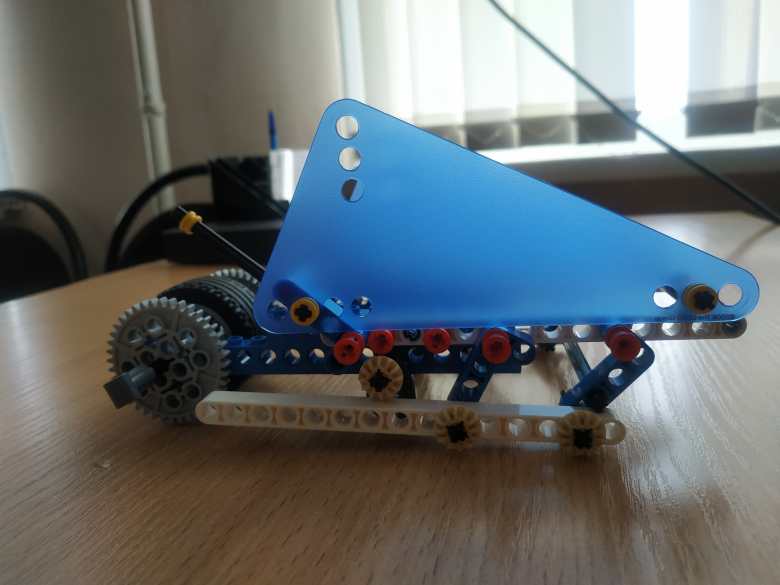
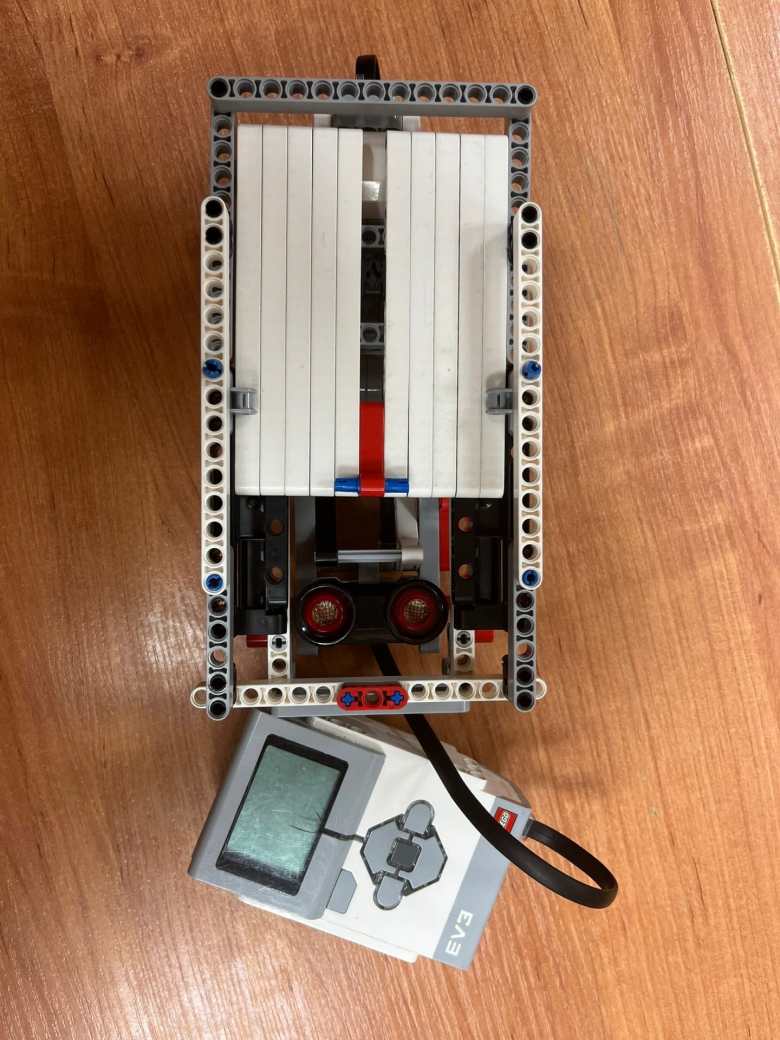
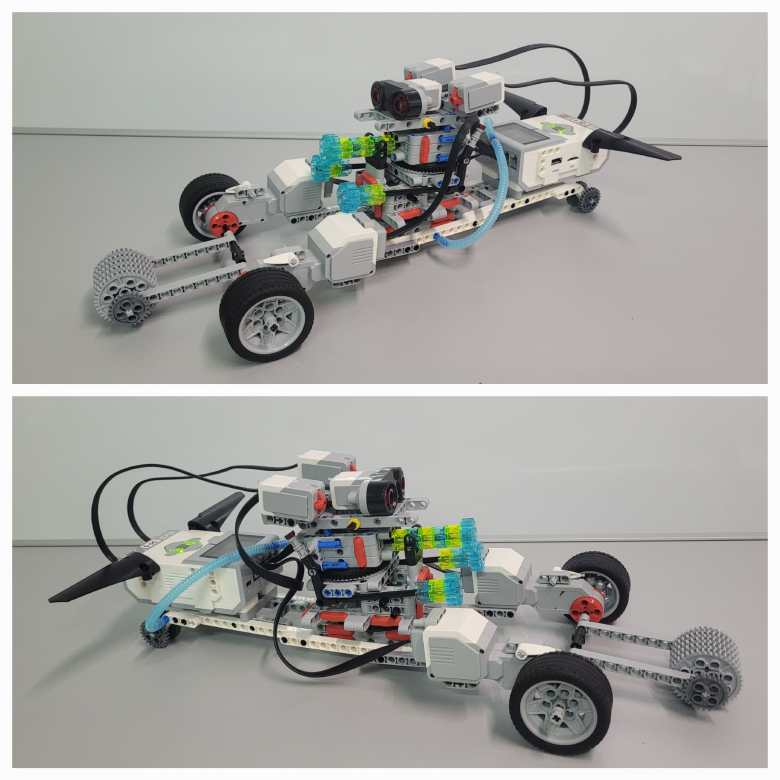
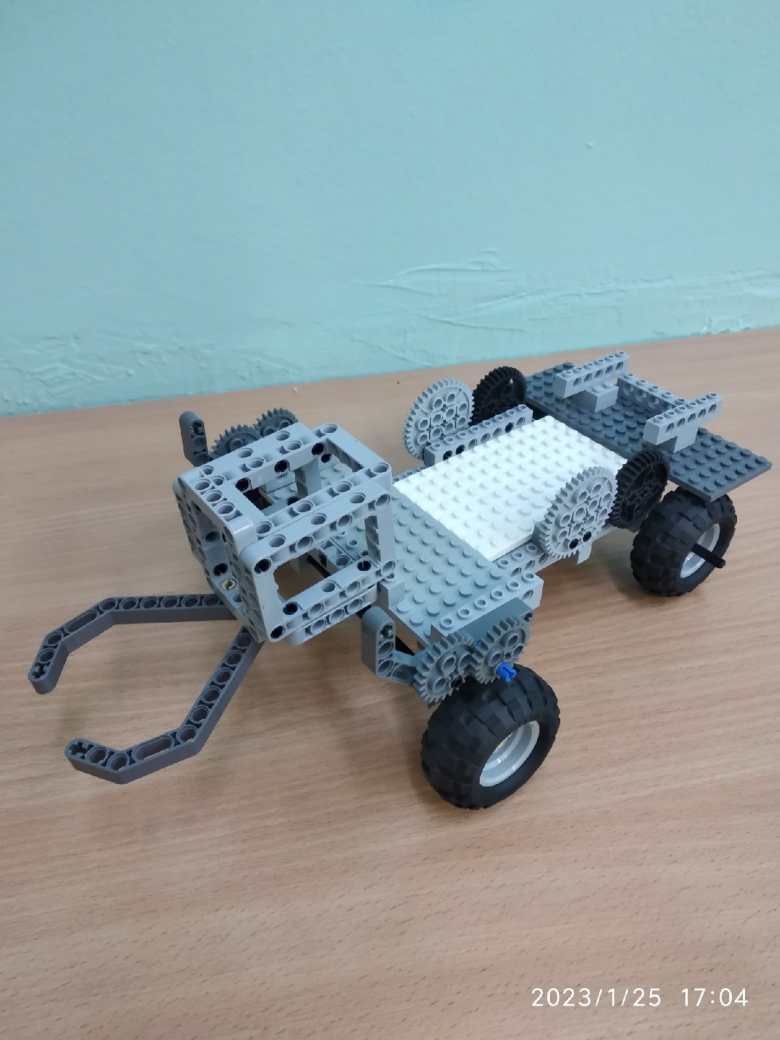
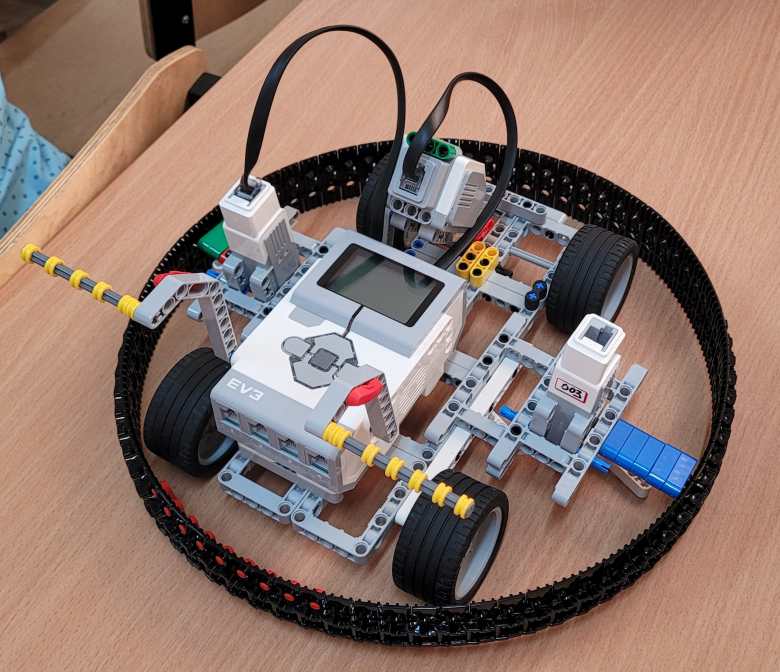
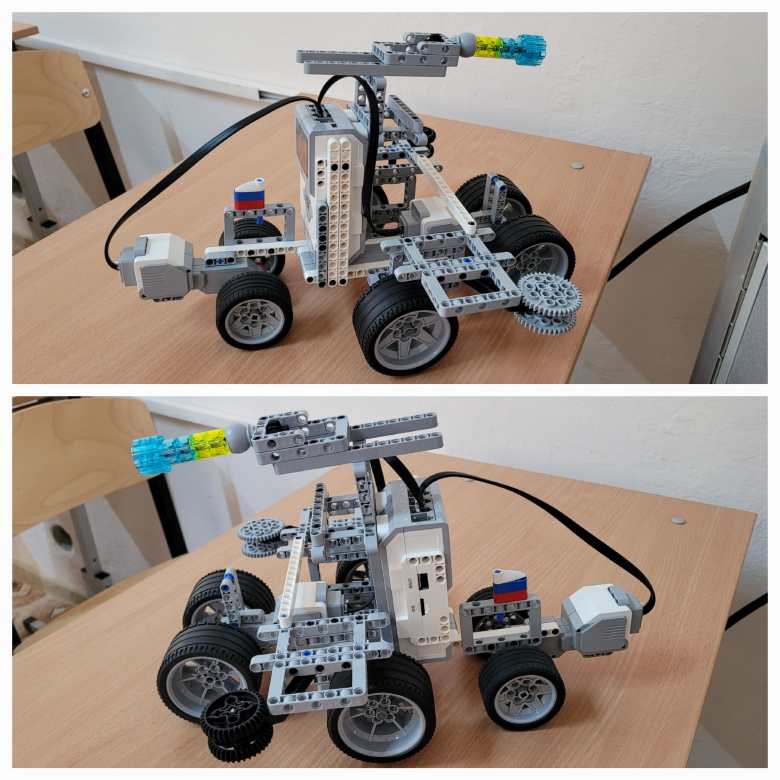
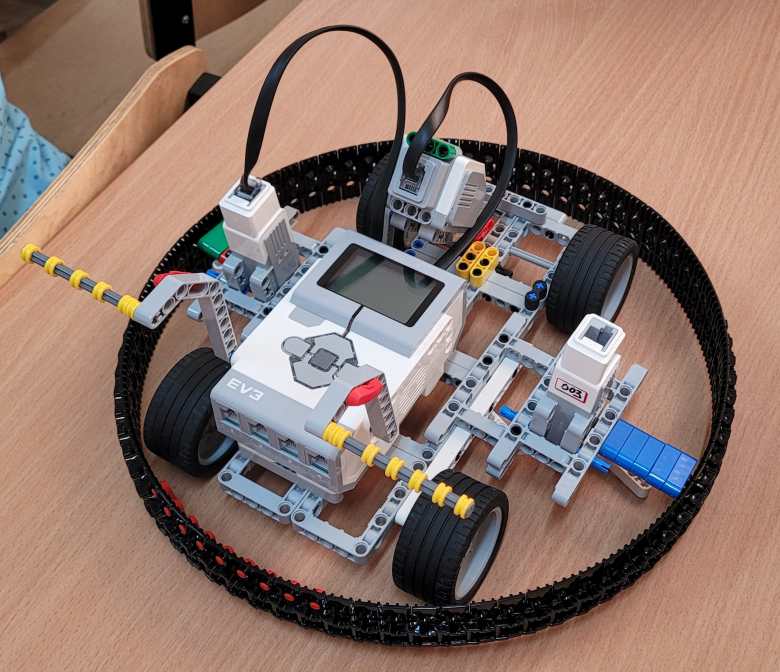
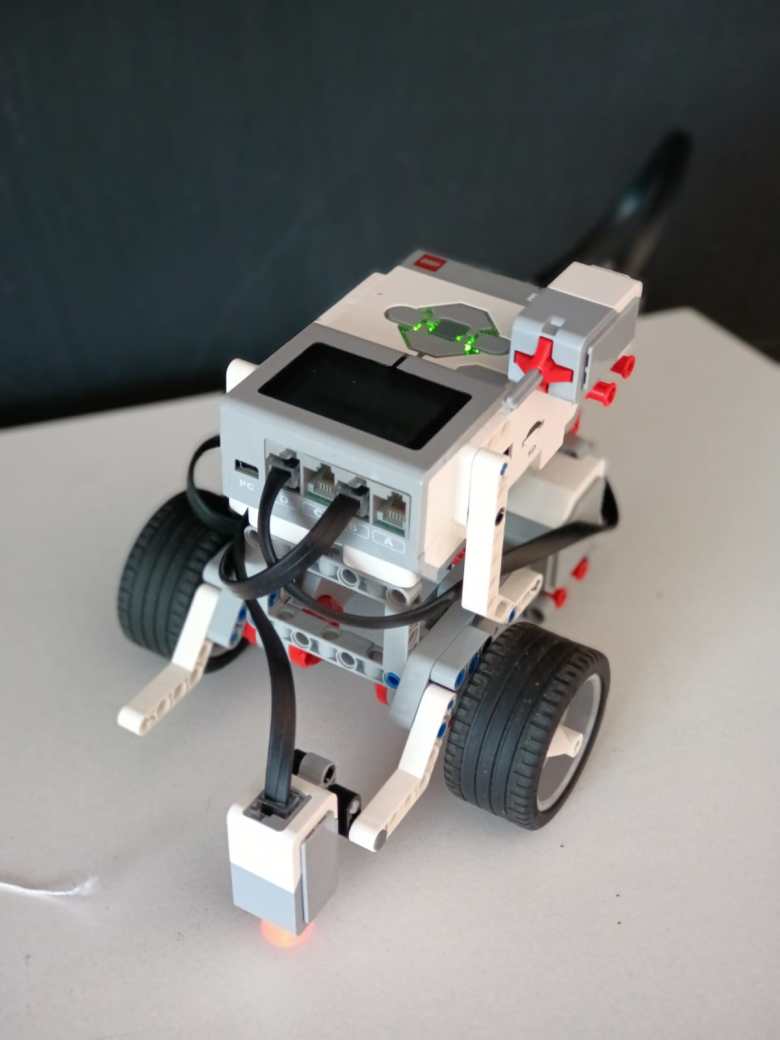
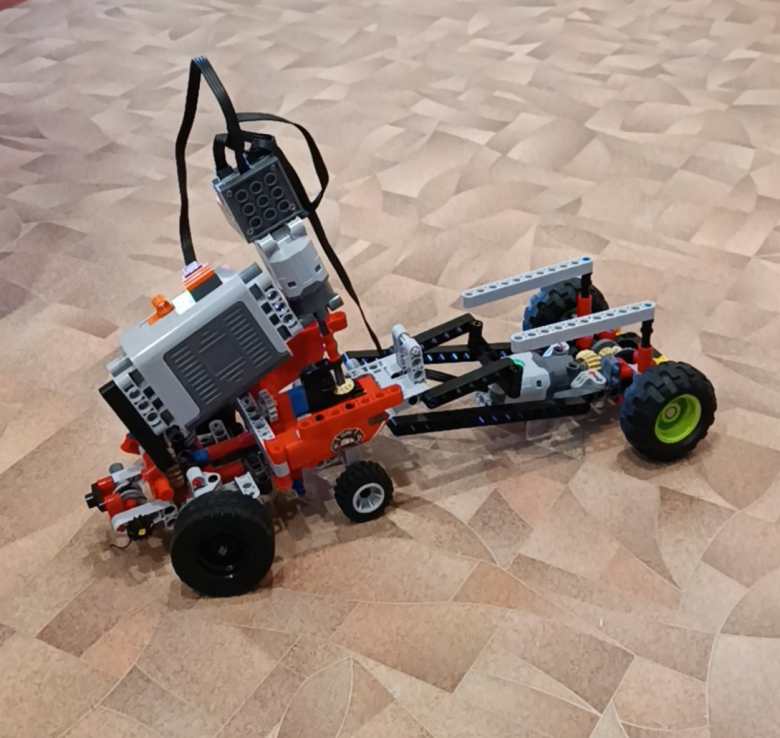
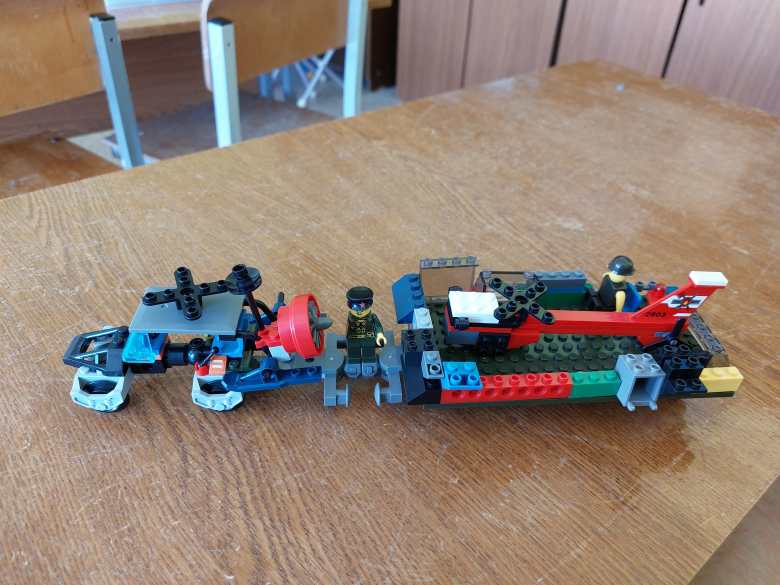
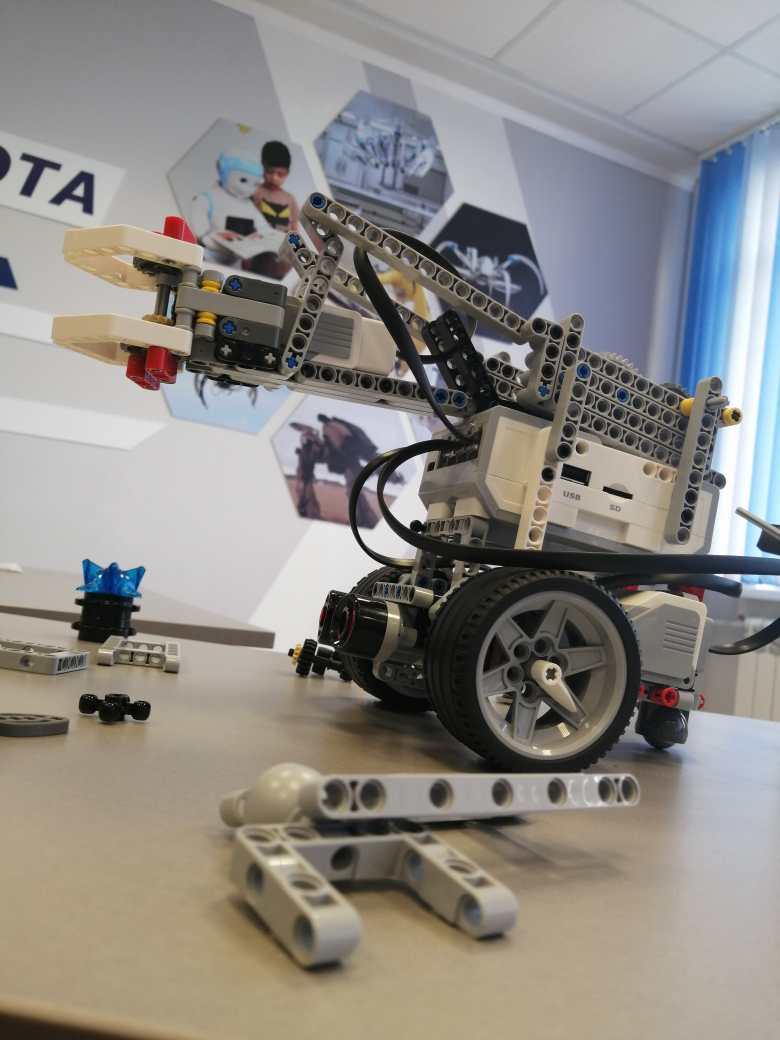
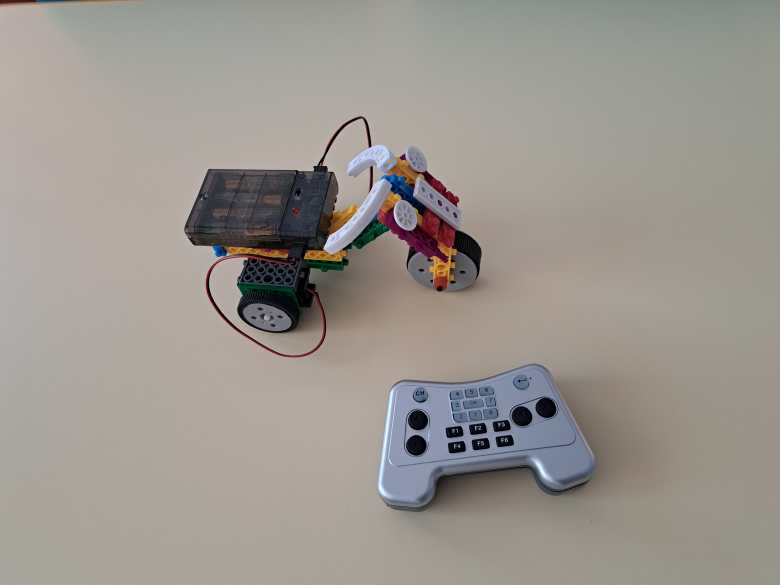
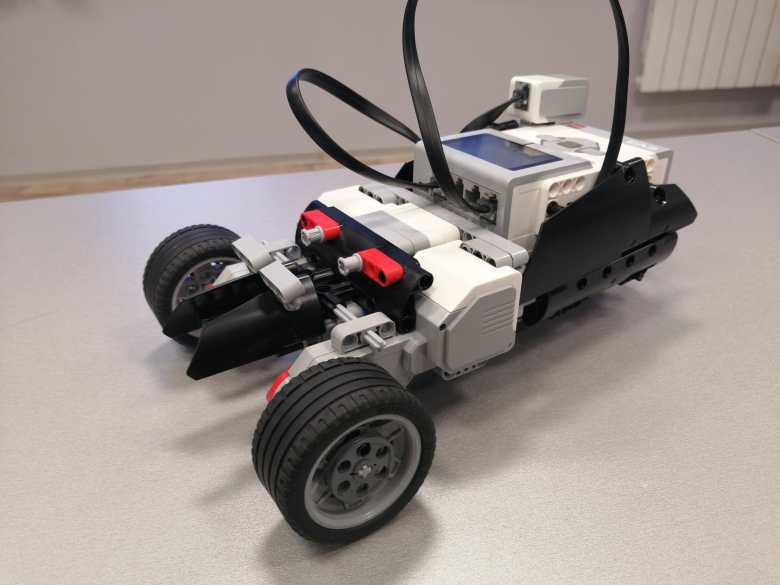
Робот-тягач Данный робот устроен таким образом, что с легкостью может преодолевать любые типы поверхностей с помощью гусениц. Он имеет 2 независимые оси, которые приводятся в движение двумя двигателями. Робот предназначен для для моделирования поведения гусеничных машин при езде по различным типам грунта
Работа Робот-тягач
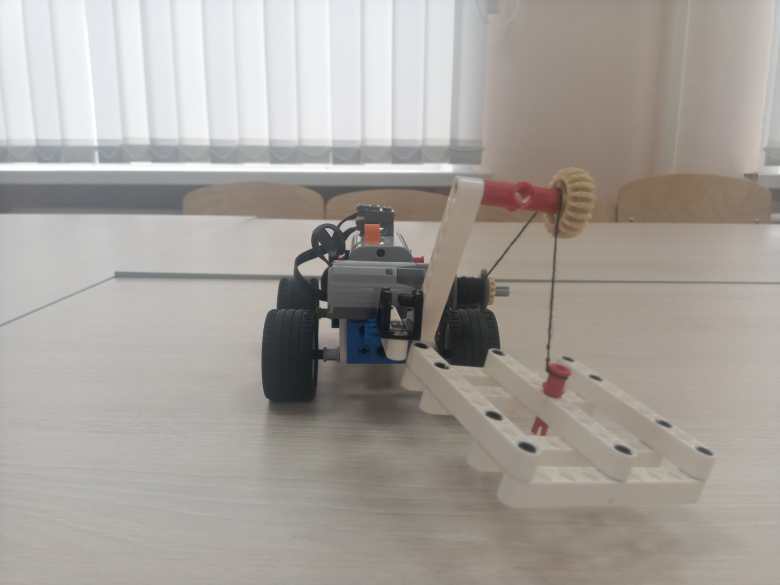
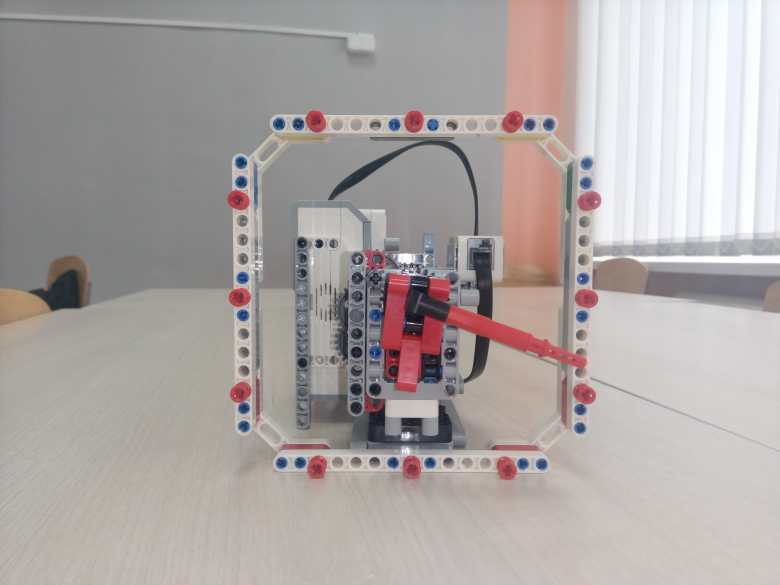
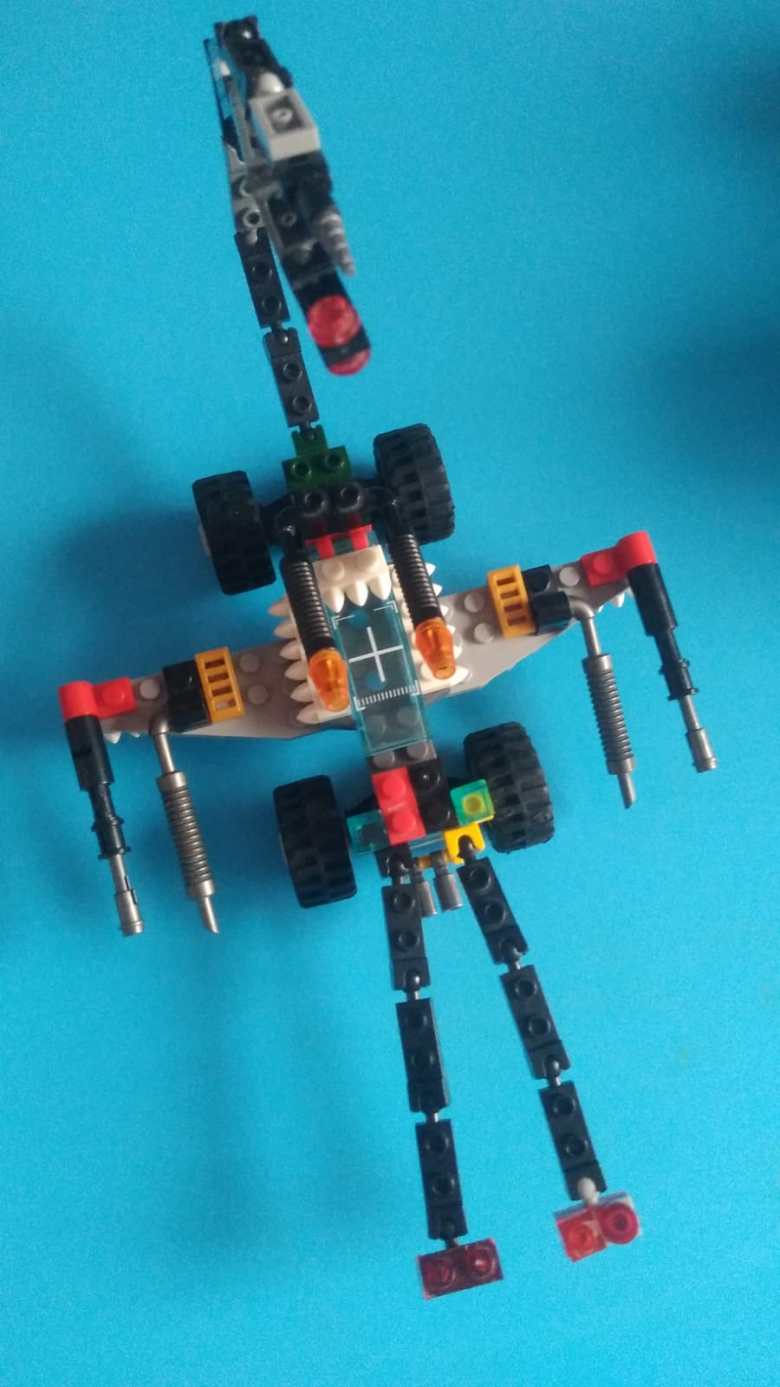
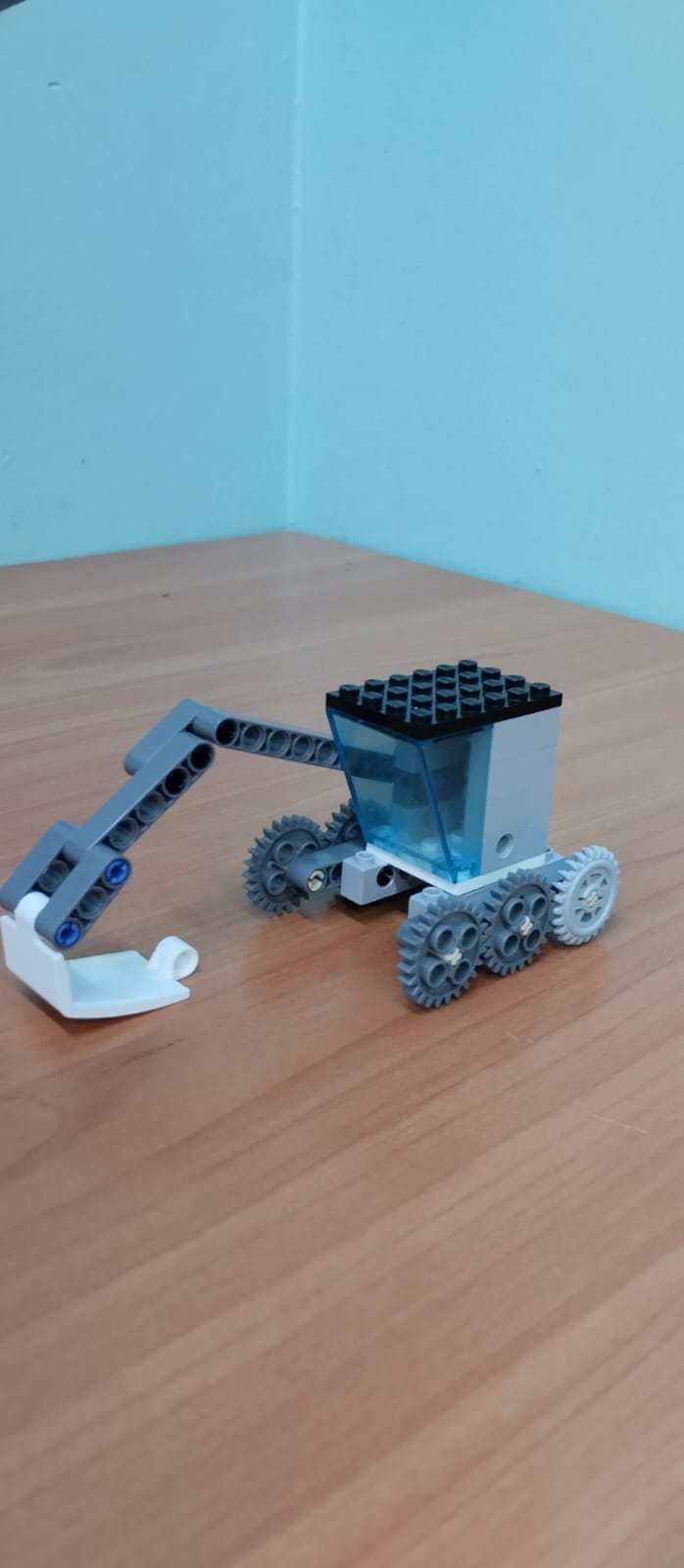
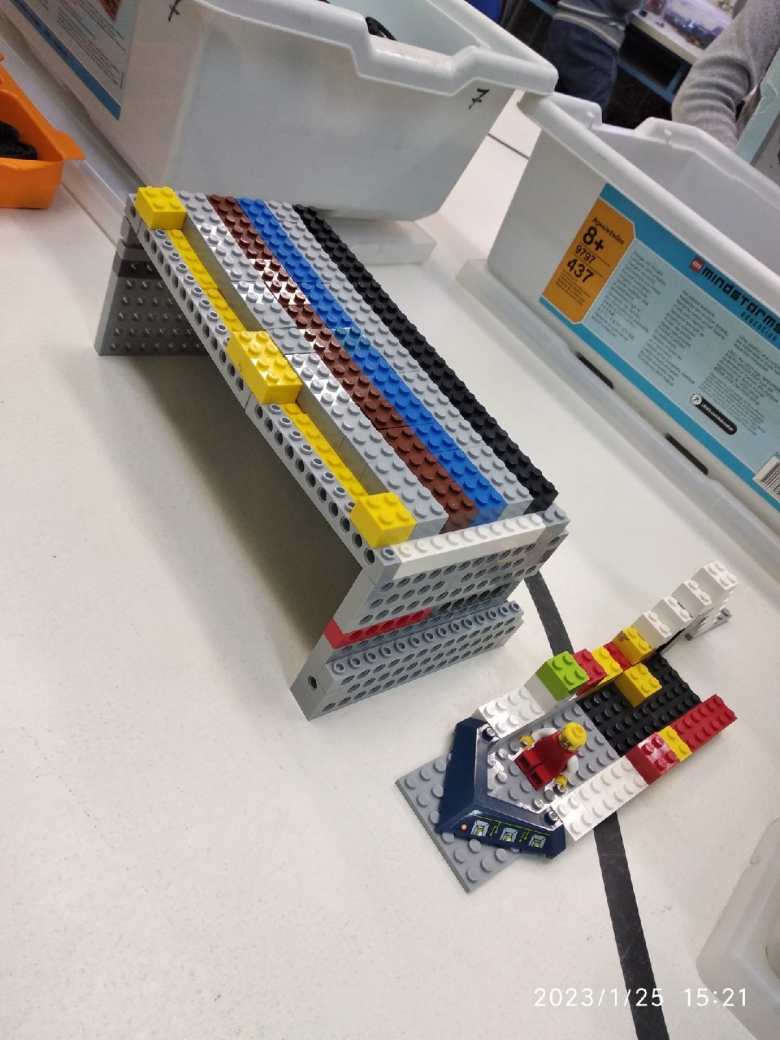
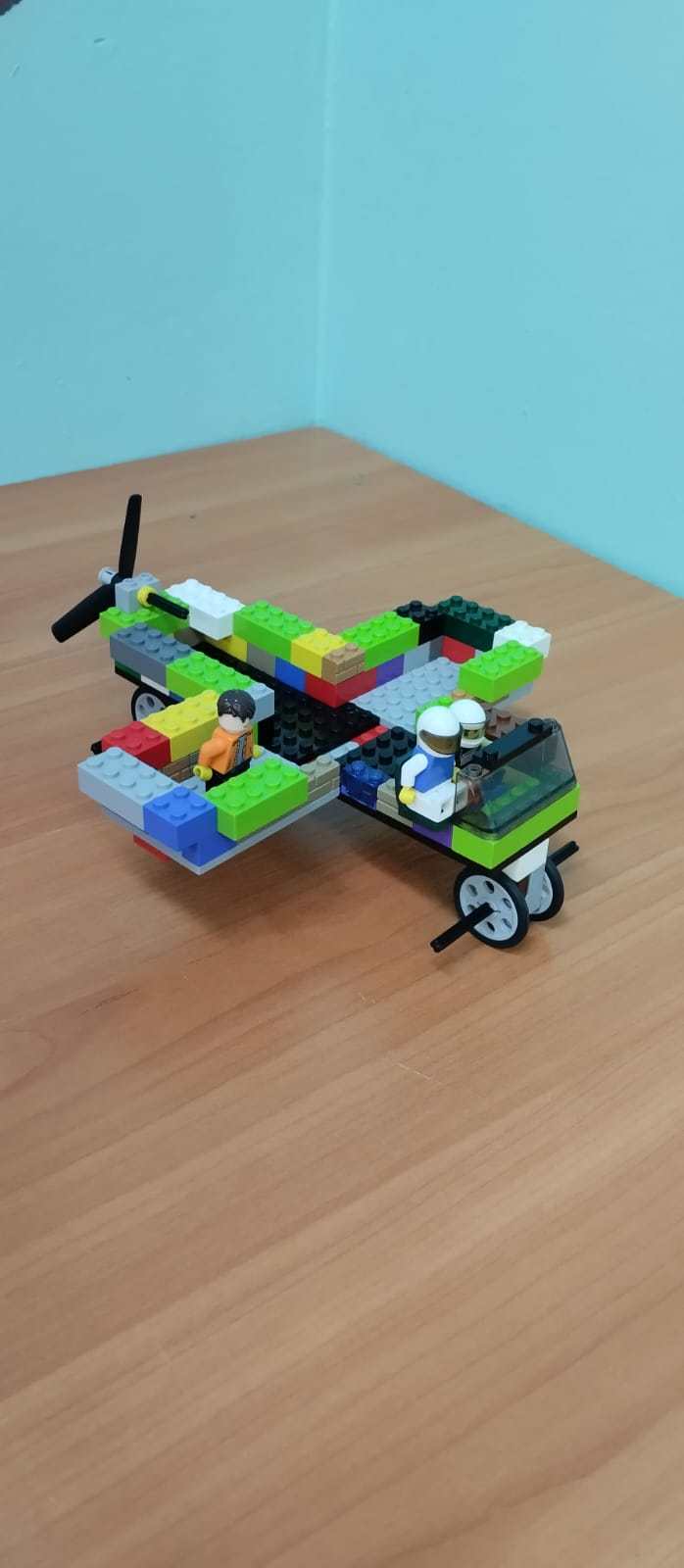
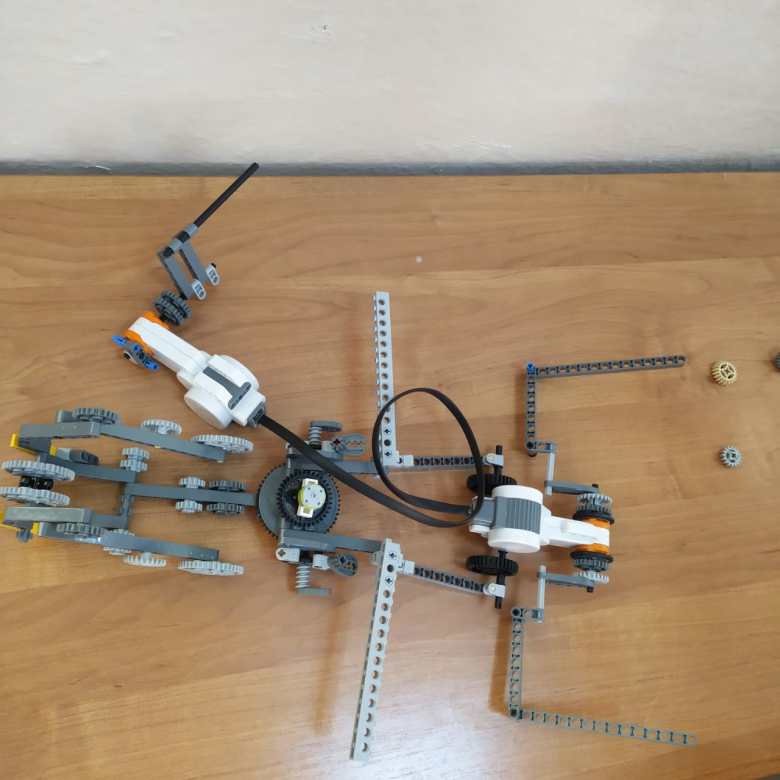
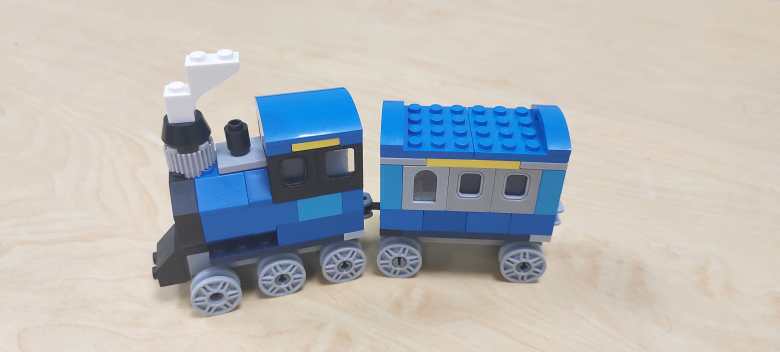
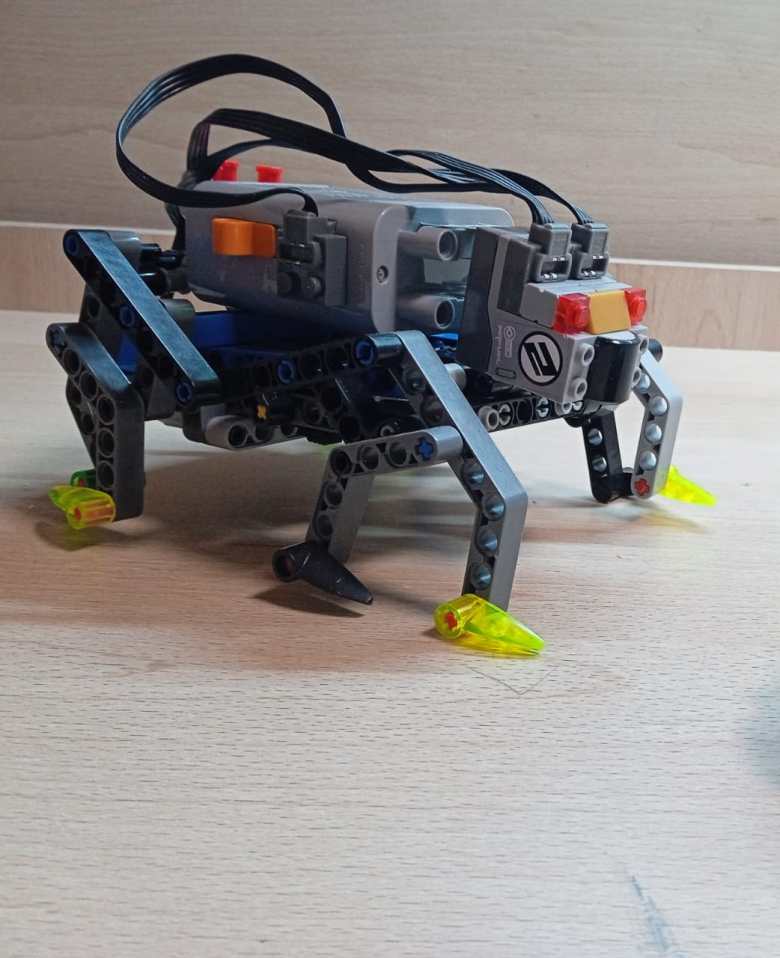
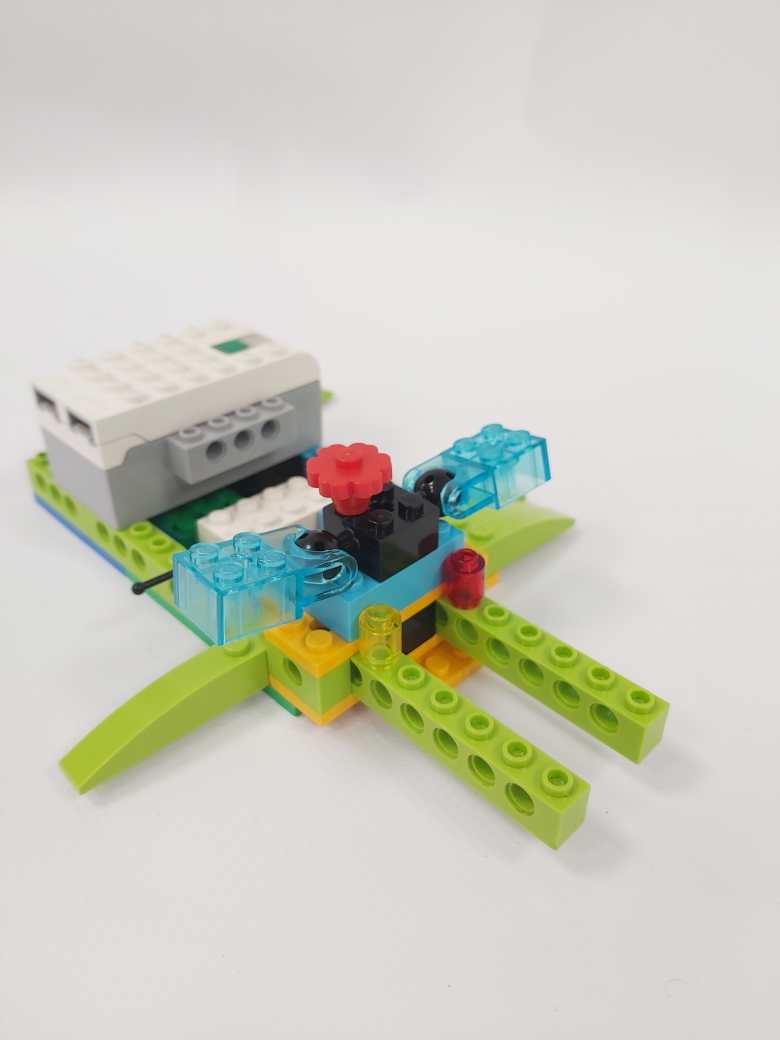
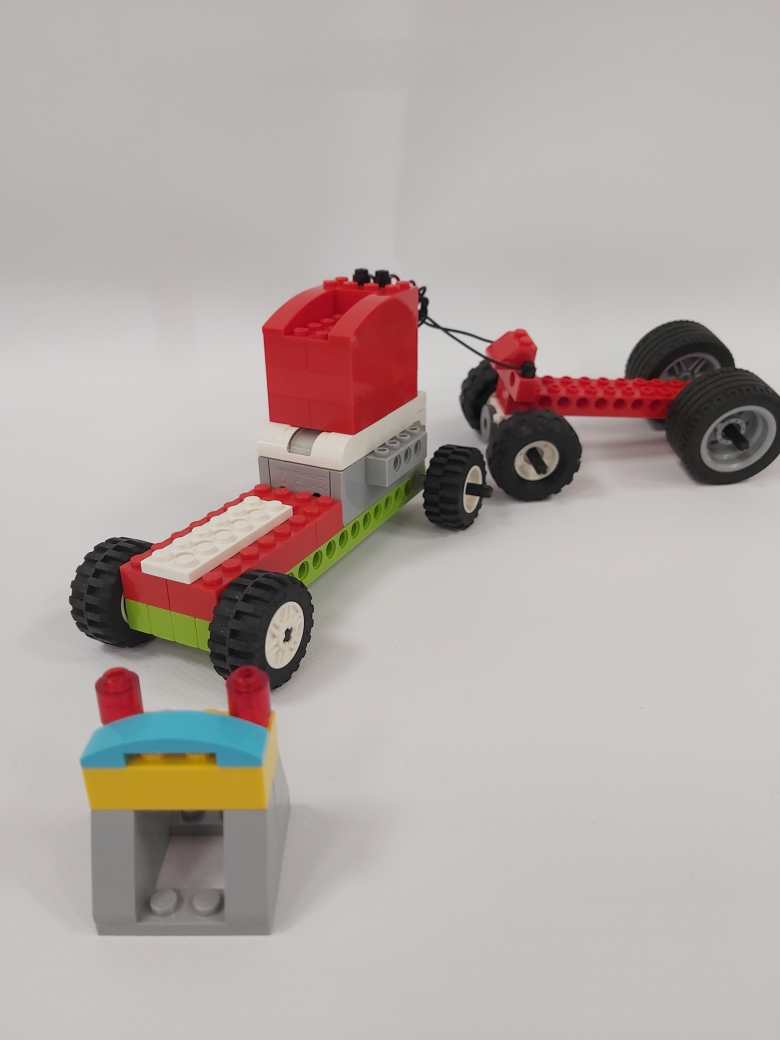
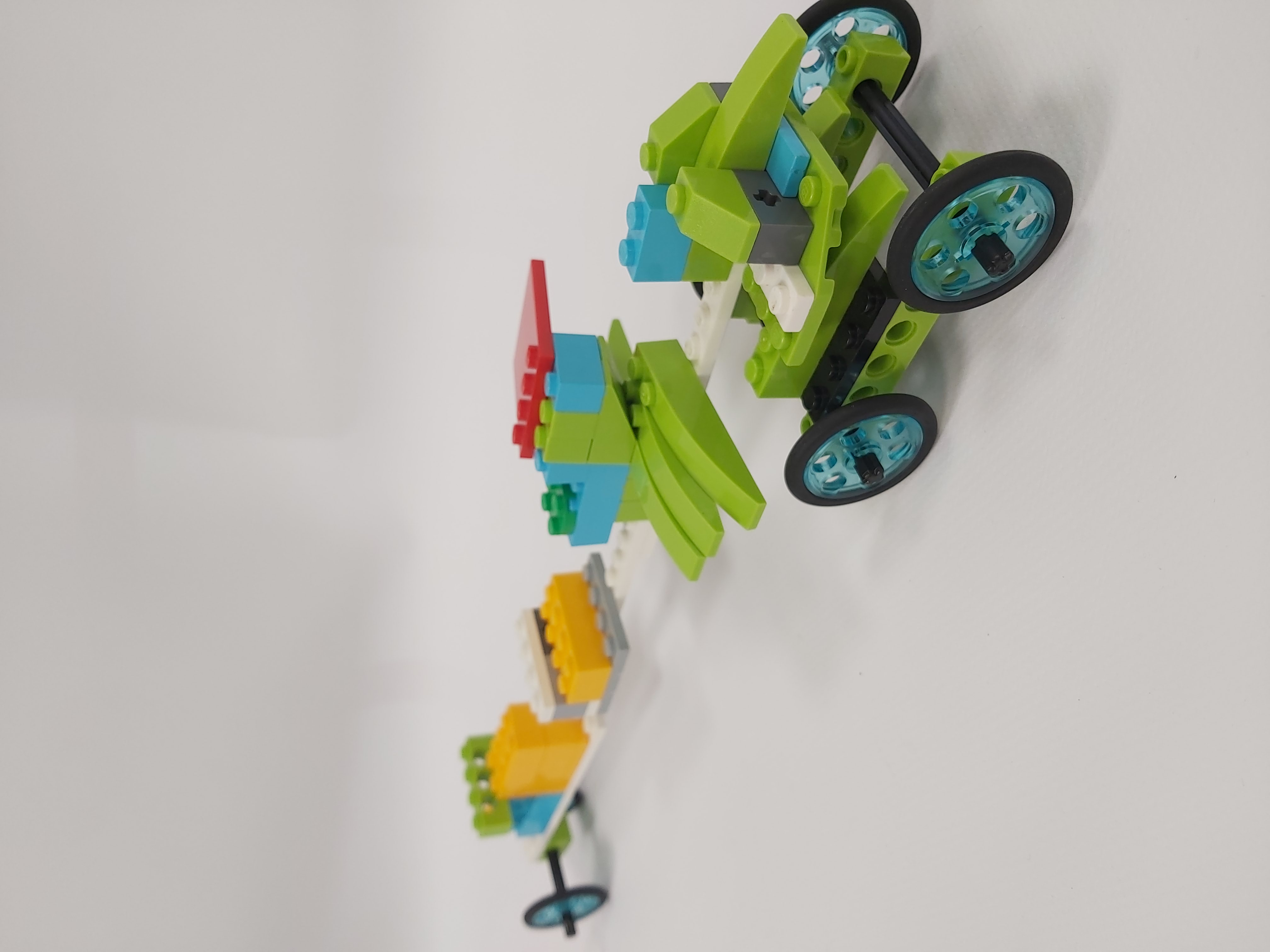
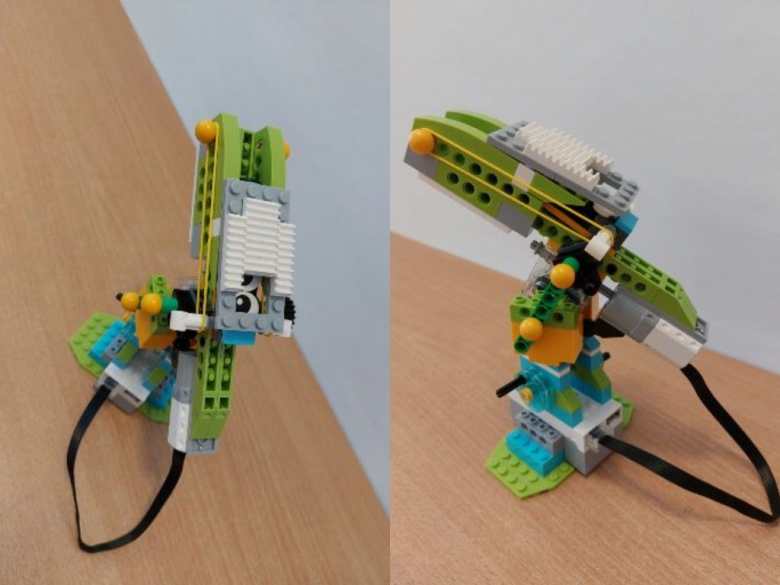
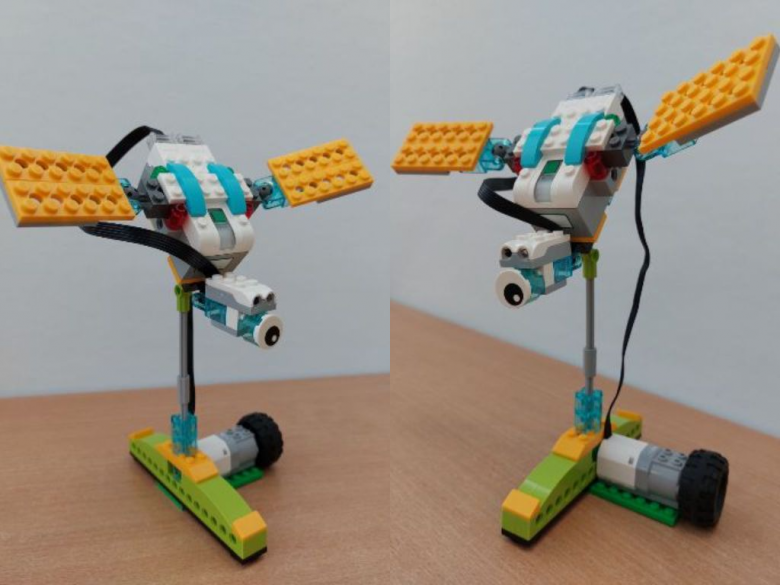
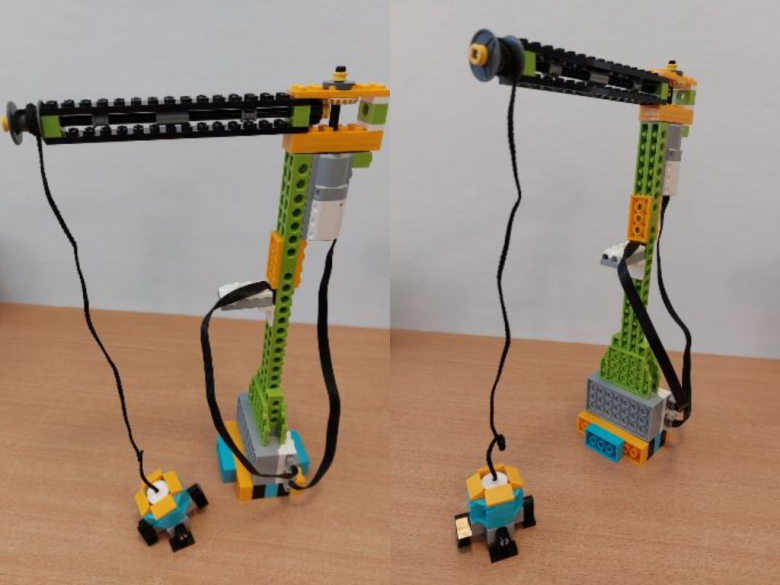
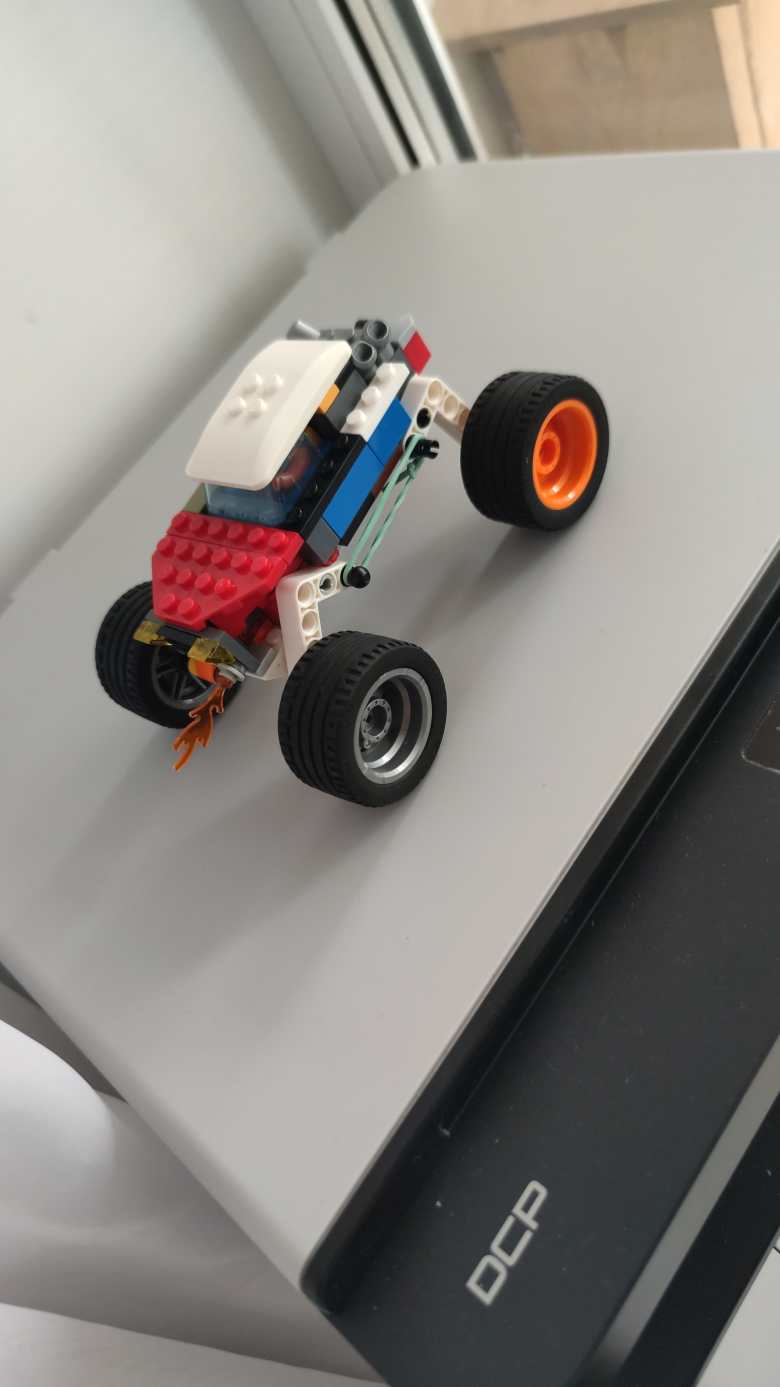
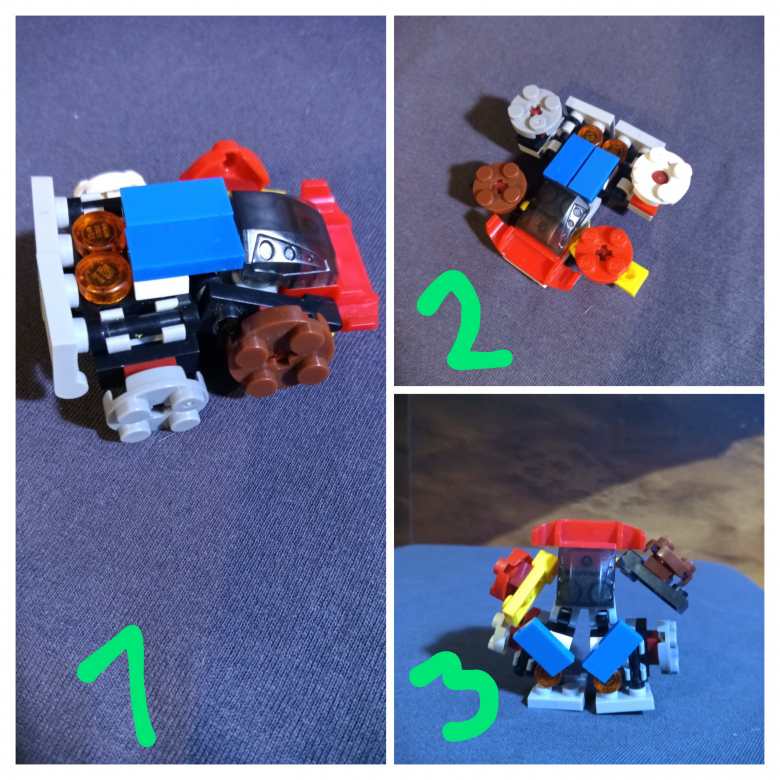
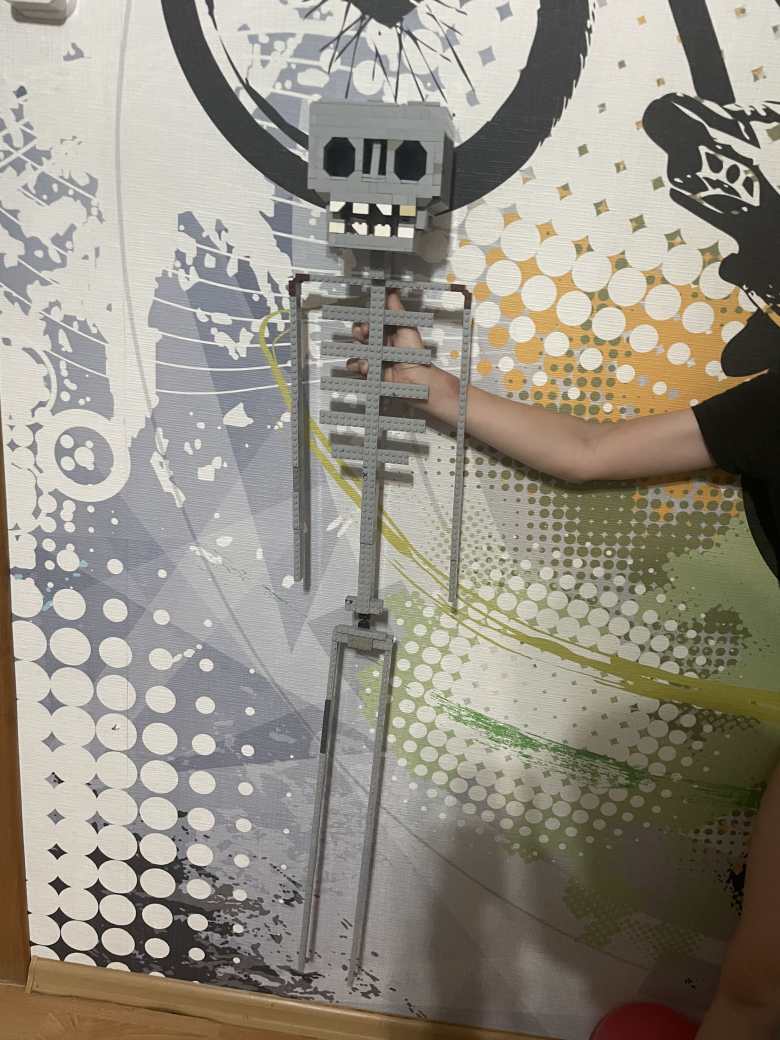
Другие работы