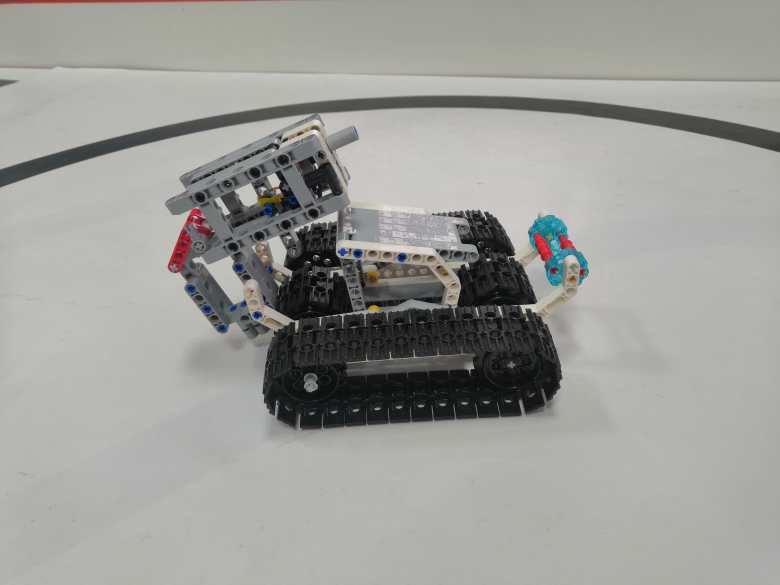
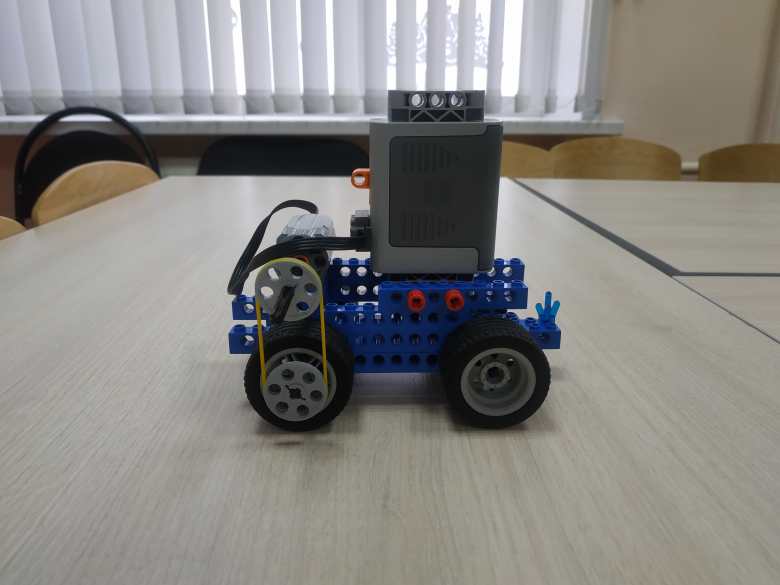
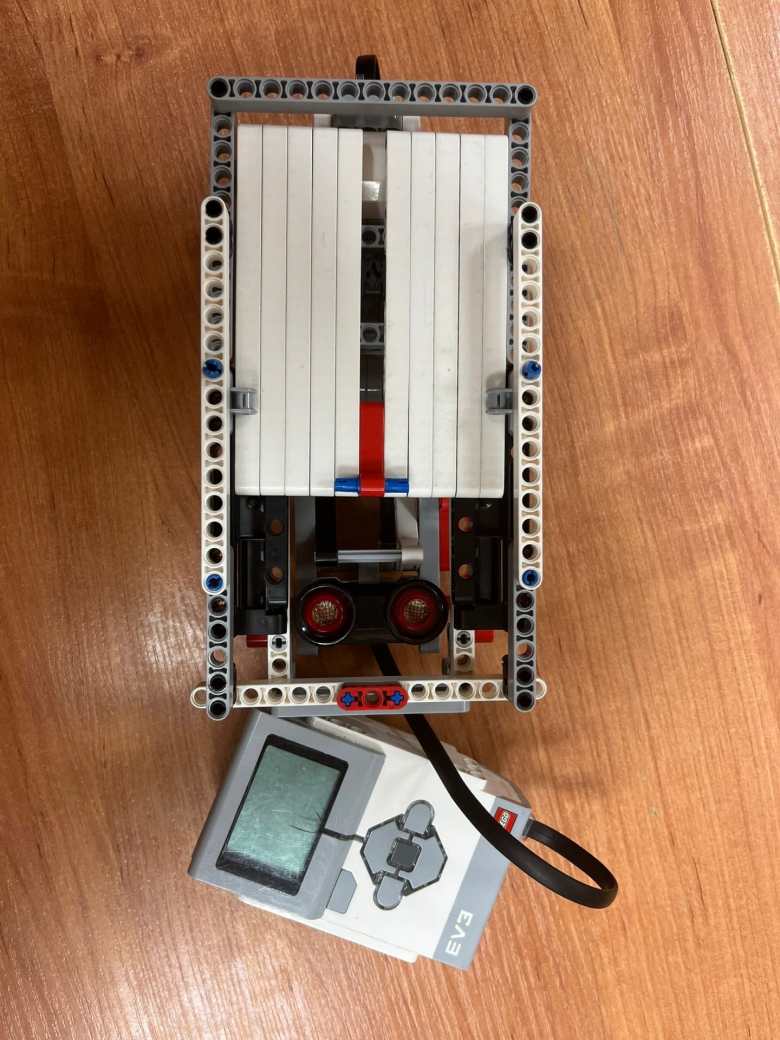
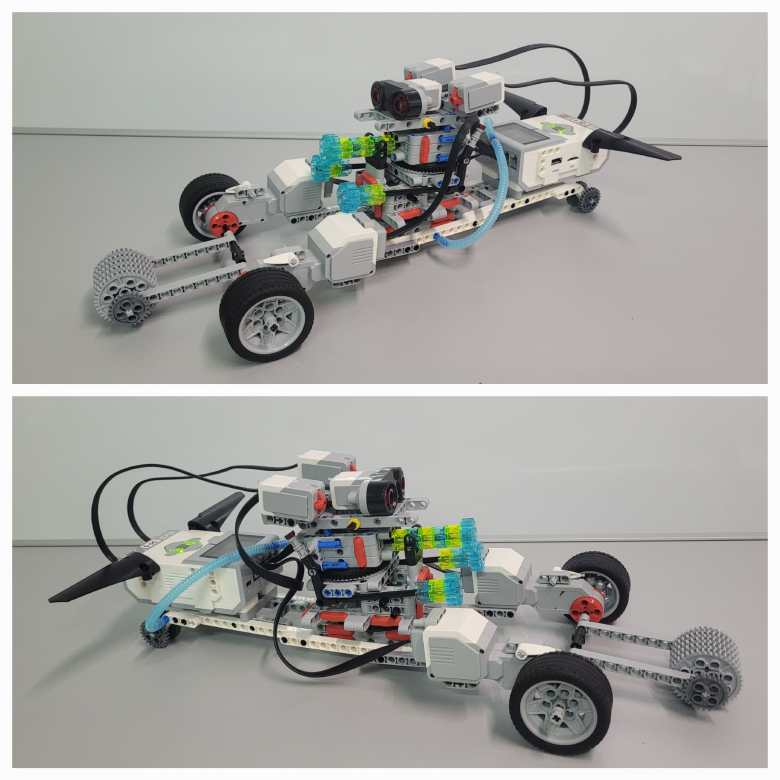
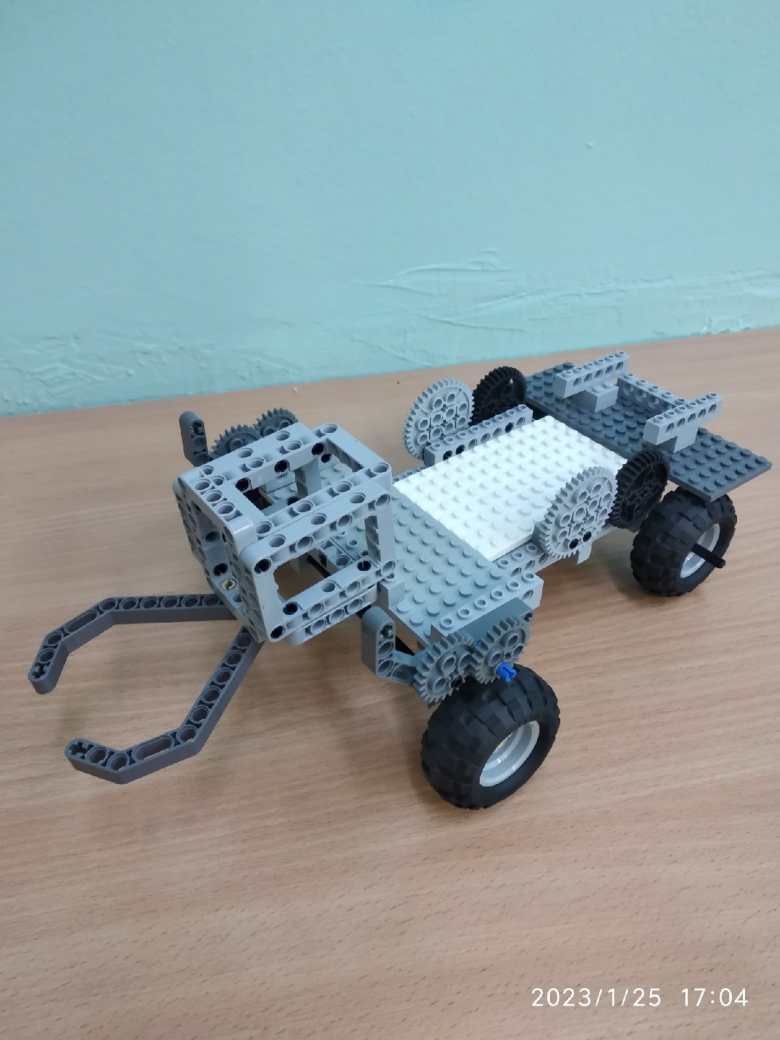
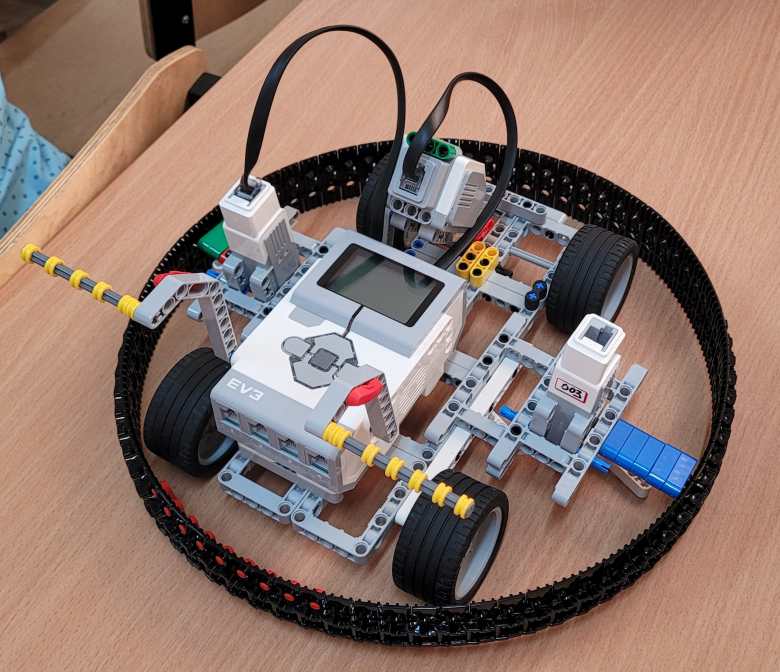
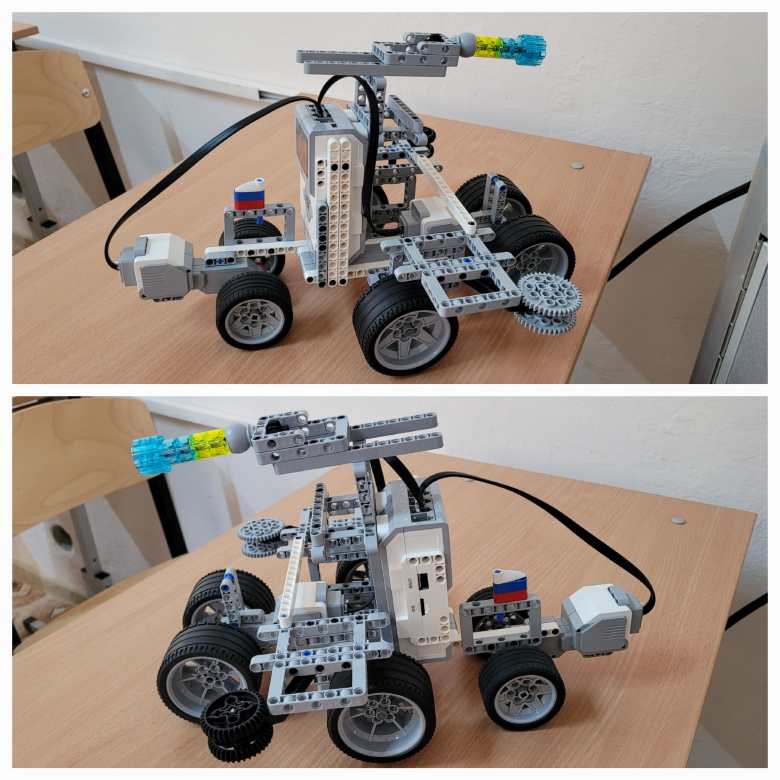
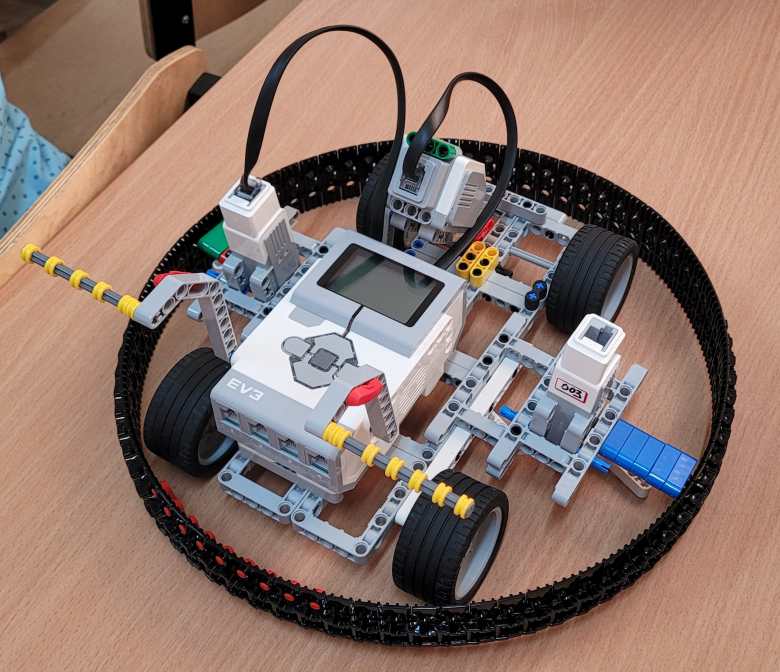
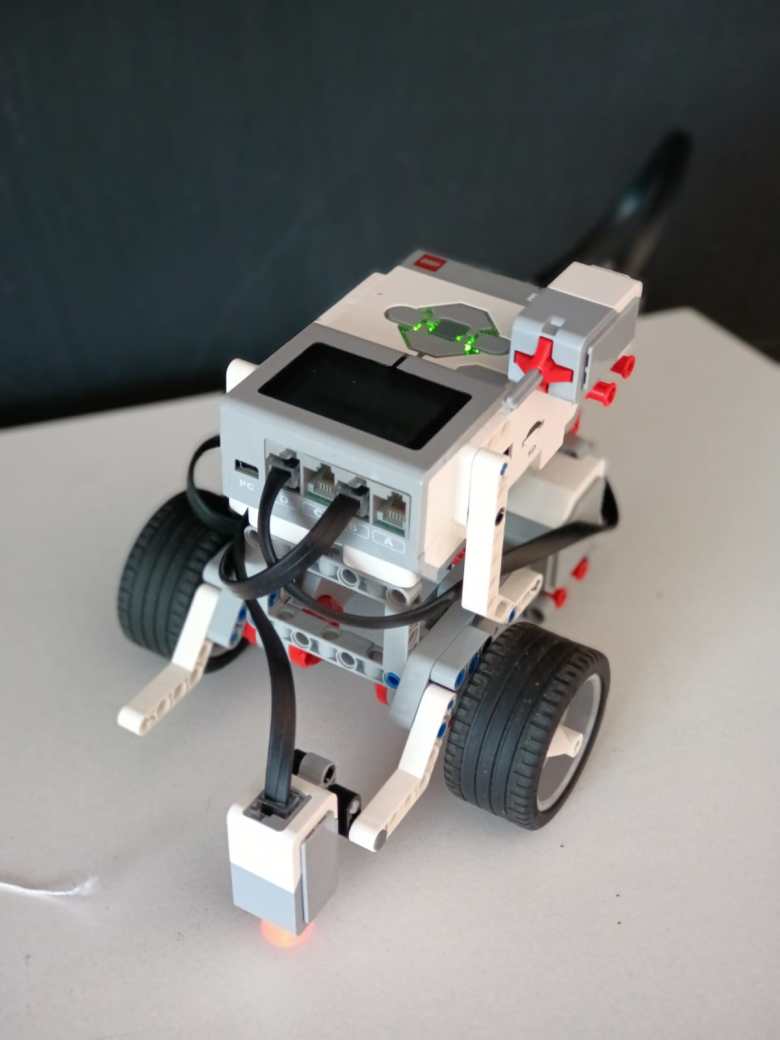
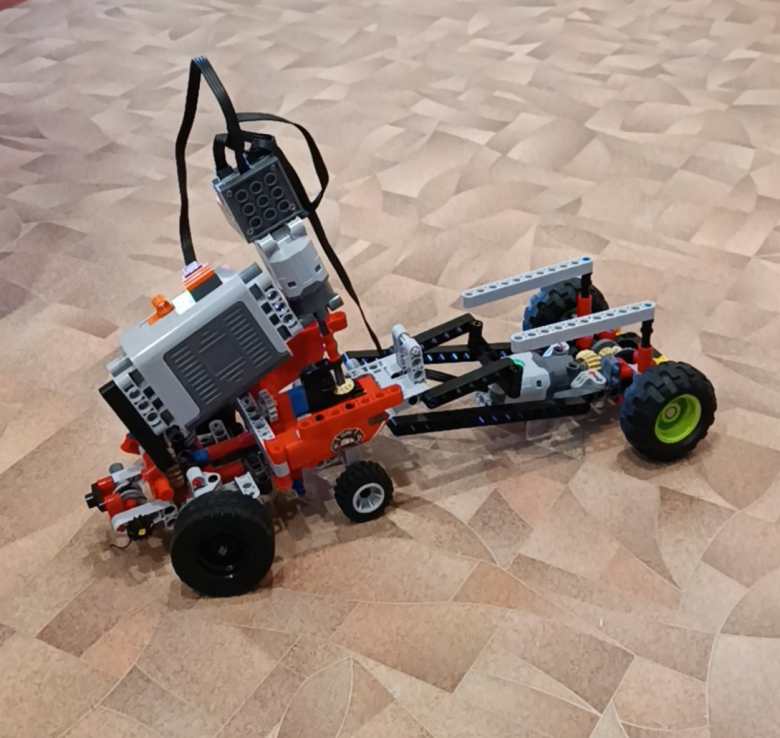
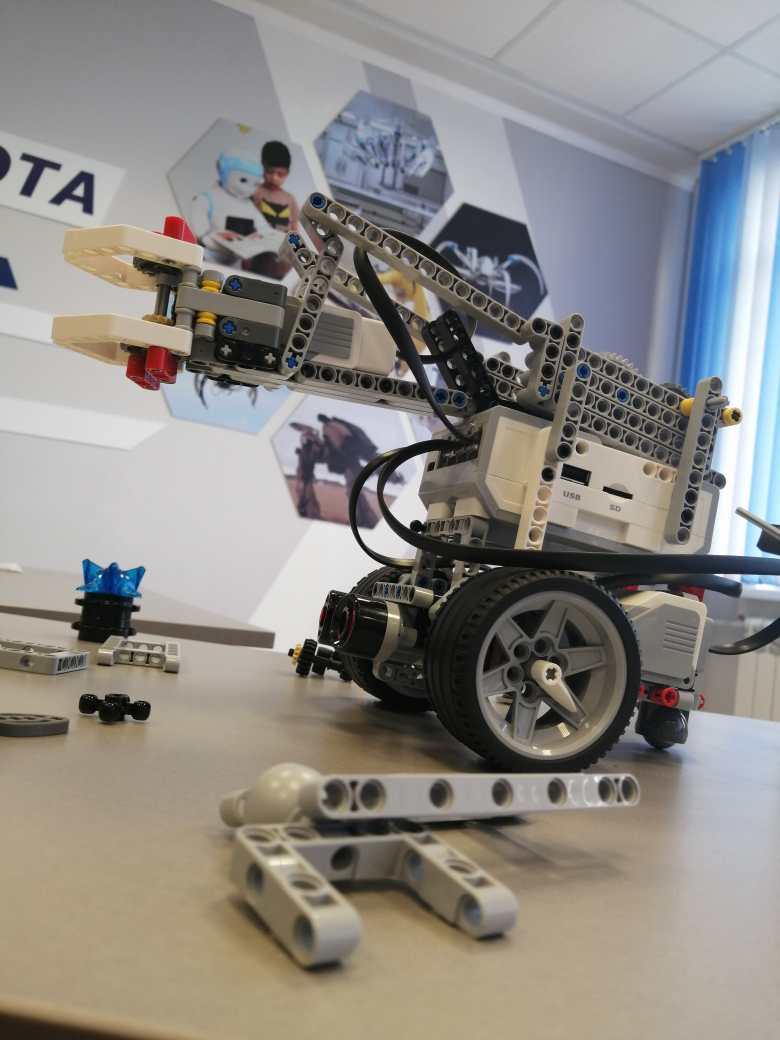
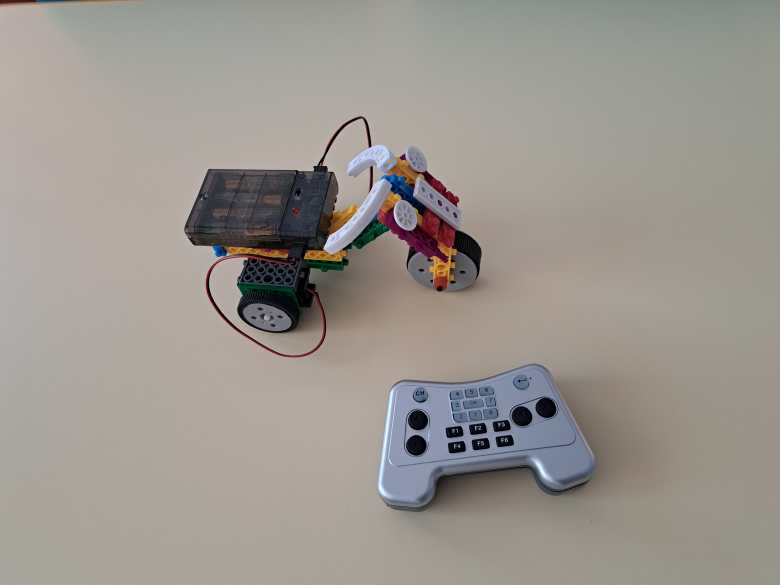
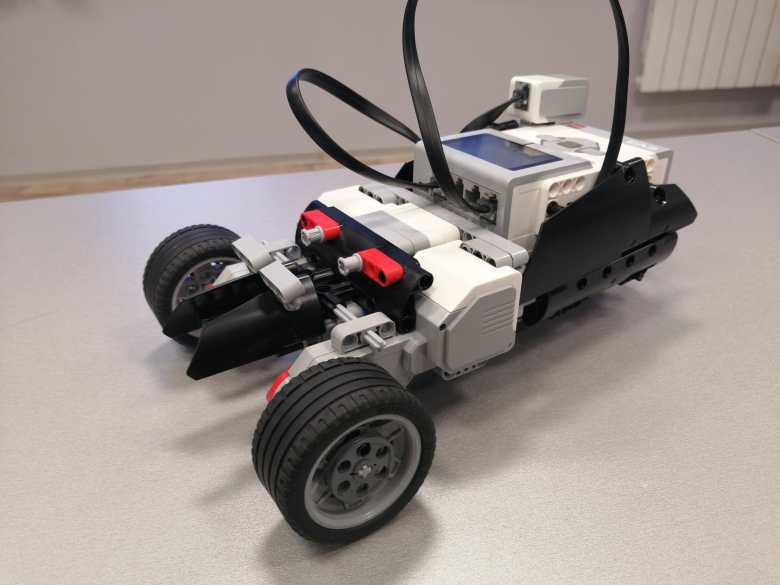
Данный робот предназначен для участия в турнирах "Сумо". Робот собирался на базе конструктора LEGO Mindstorm EV3. Его главная цель - вытолкнуть соперника за черную линию ринга и не быть вытолкнутым самому. Для выполнения данной цели у робота предусмотрены 2 датчика расстояния, которые находятся спереди и с зади. Они нужны для отслеживания положения противника на ринге. Как только робот видит соперника, он сразу направляется к нему для выталкивания за ринг. В выталкивании роботу помогают 2 крепких бампера, обогнуть, либо поддеть которые очень сложно. Также у робота предусмотрены 2 датчика цвета, спереди и сзади, которые направлены вниз, на пол, для отслеживания черной линии края ринга. Как только робот наезжает на черную линию, датчики цвета это фиксируют, и робот автоматически начинает откатываться к середине ринга в поиске нового соперника. Главная отличительная особенность данного робота в том, что его можно использовать как в боях "Сумо", так и перепрограммировать под любое другое назначение. Например: робот на пульте управления; робот, едущий по черной линии; робот тягач; вертикальное расположение двигателей и две полноприводные ходовые части делают из робота полноценную платформу для создания на ее базе более сложных механизмов.
Работа Робот-сумо "Злая мина"
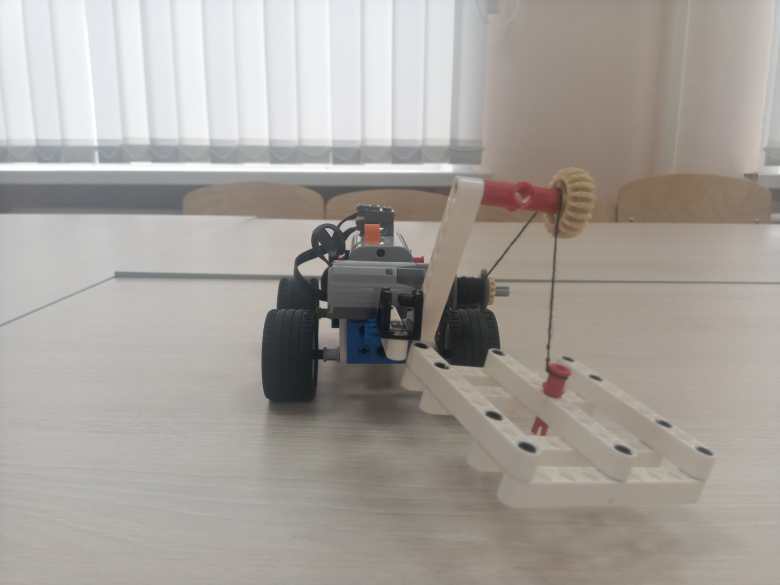
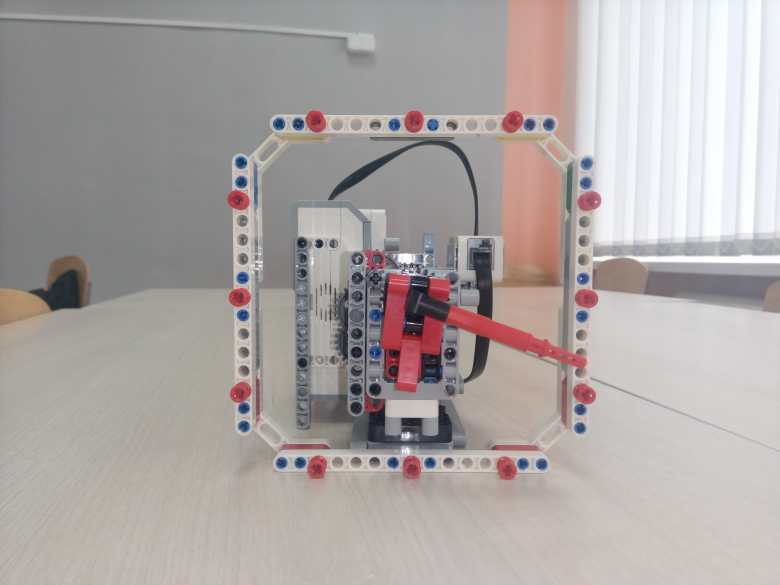
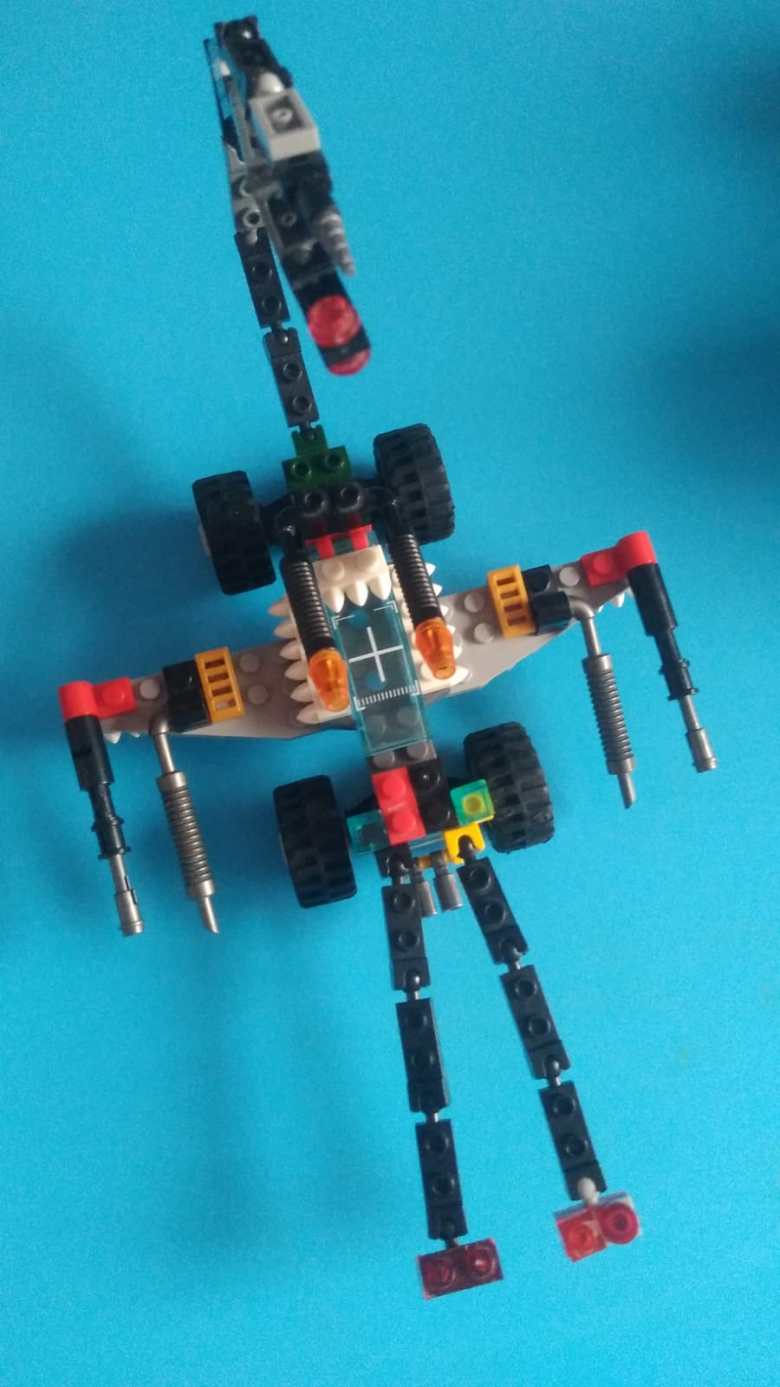
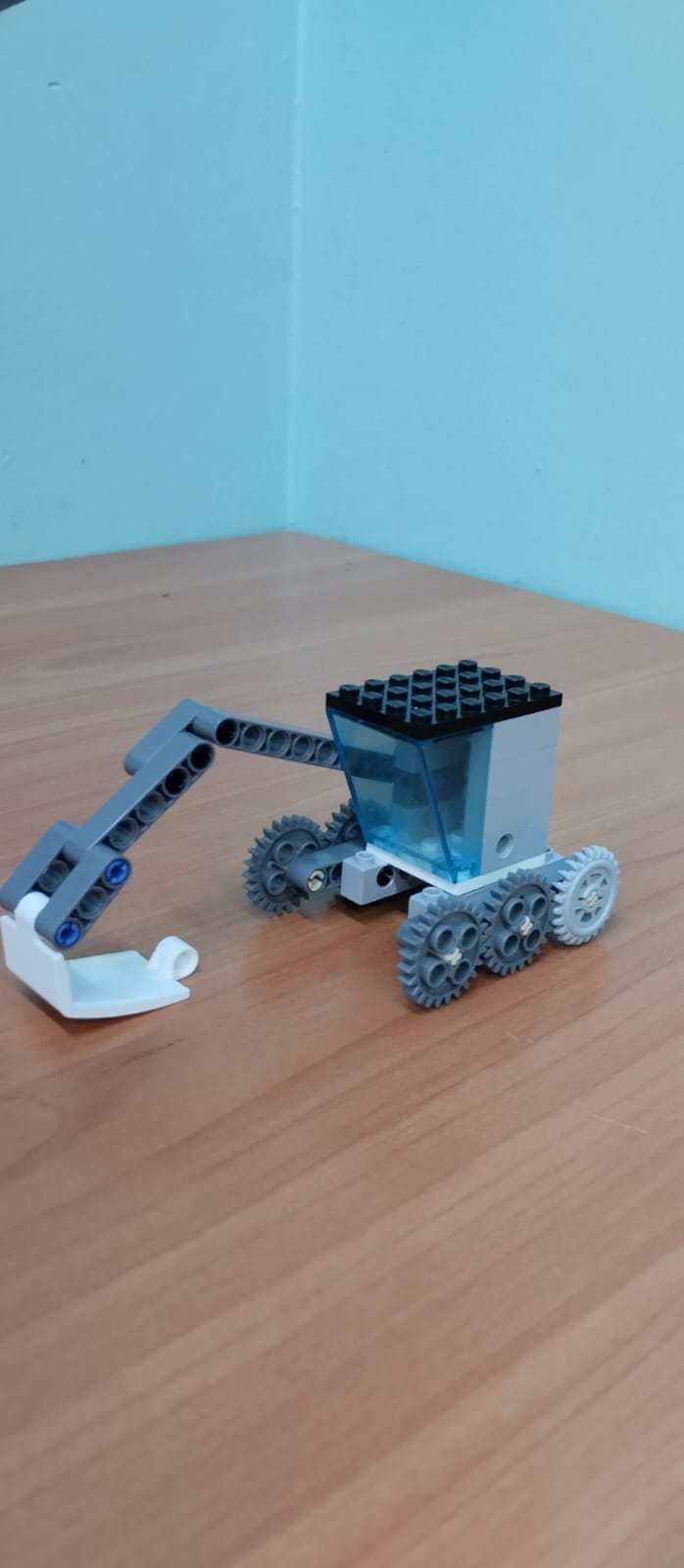
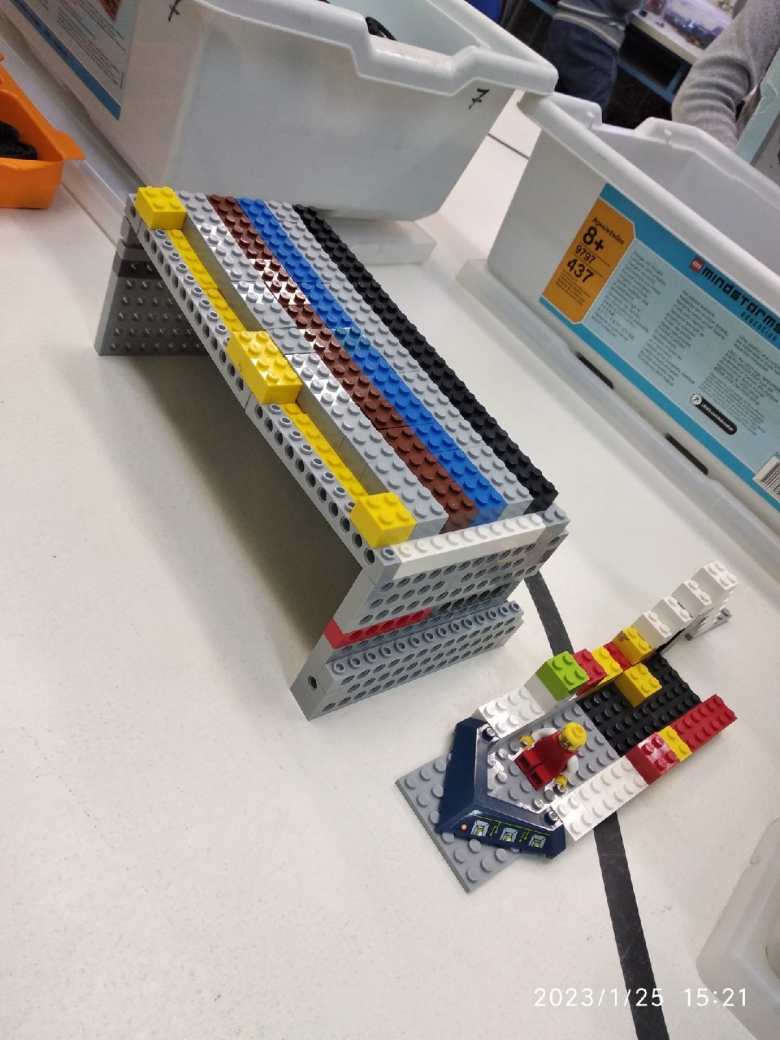
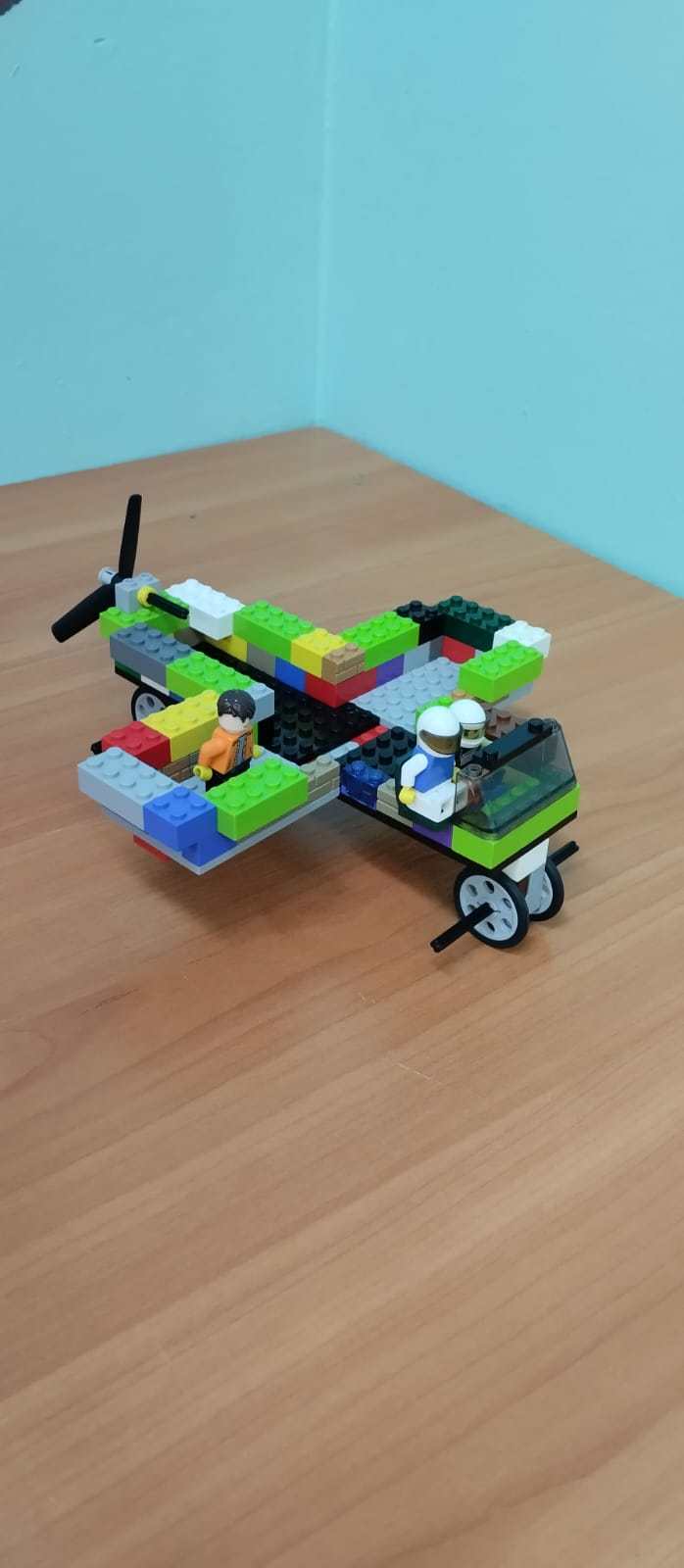
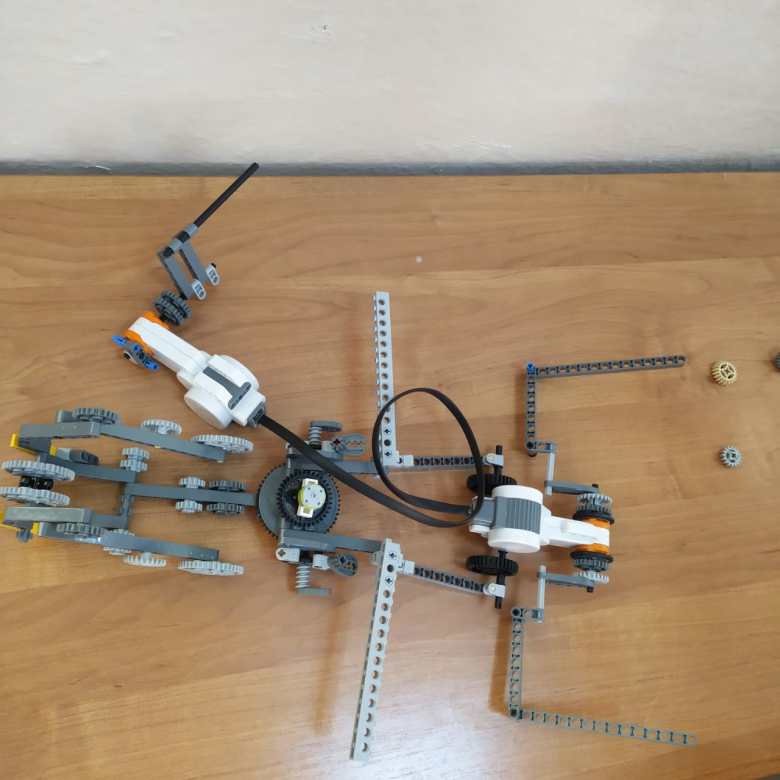
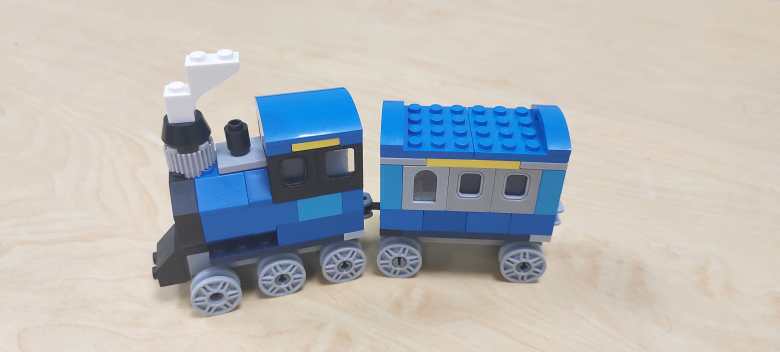
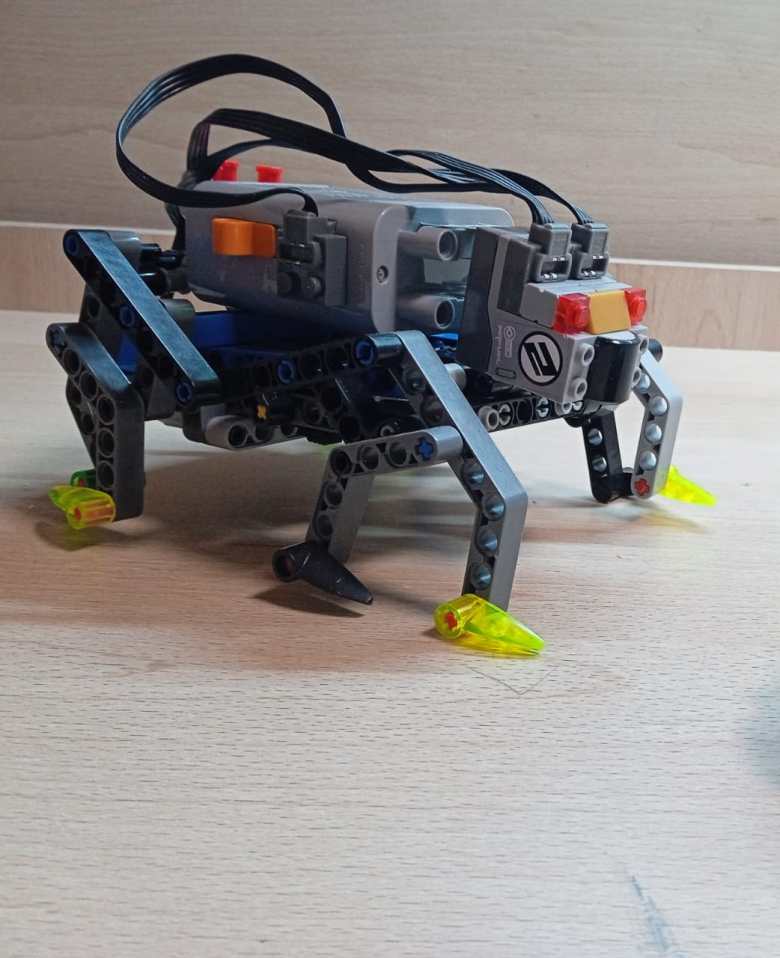
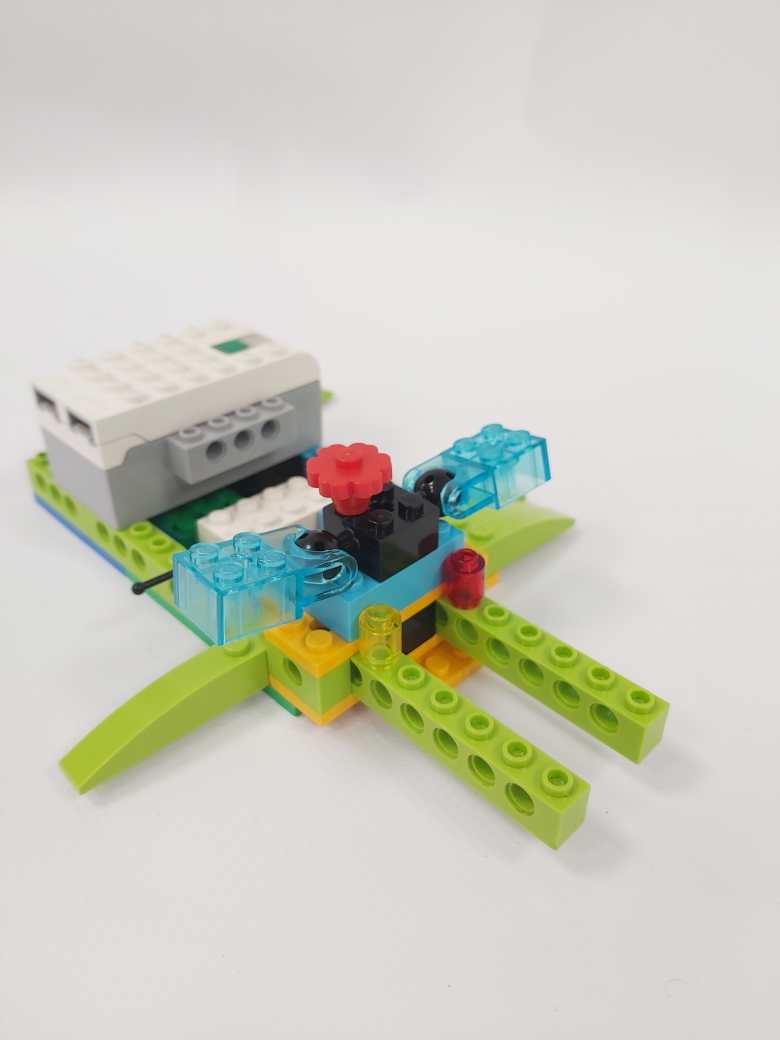
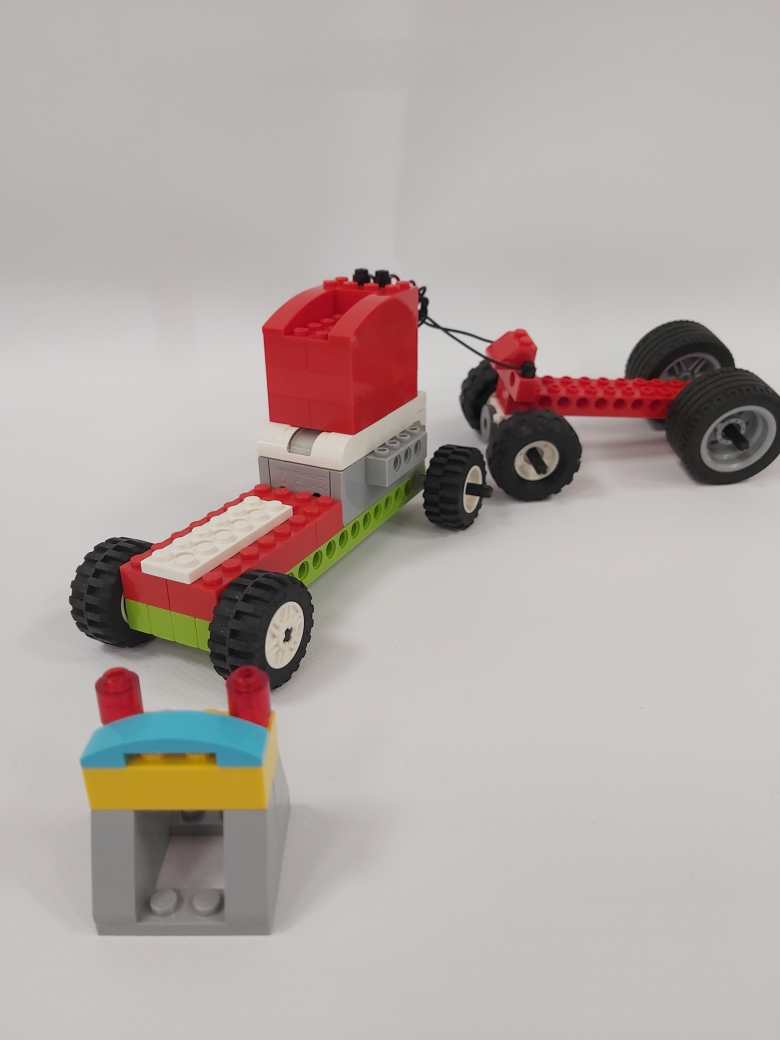
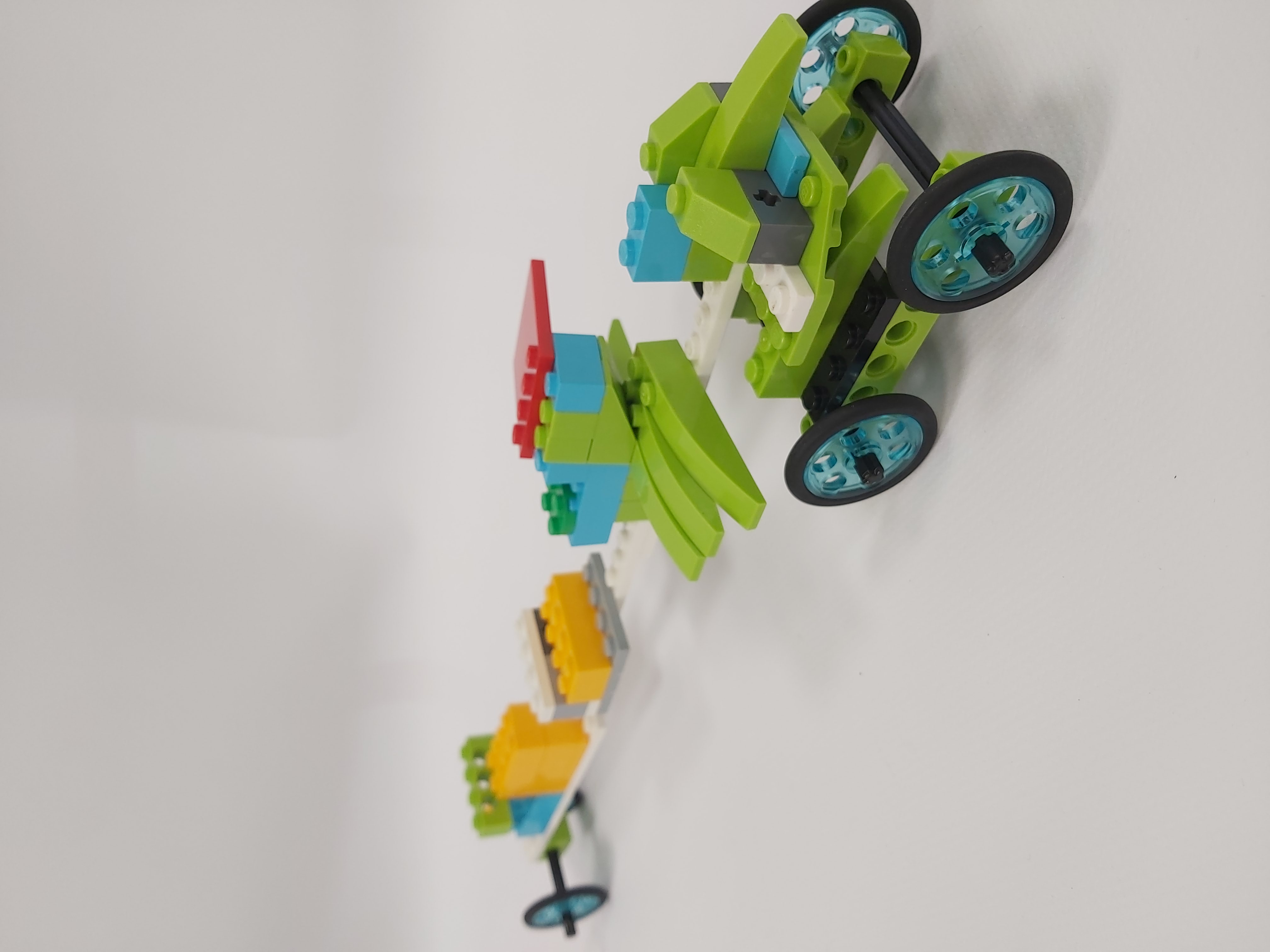
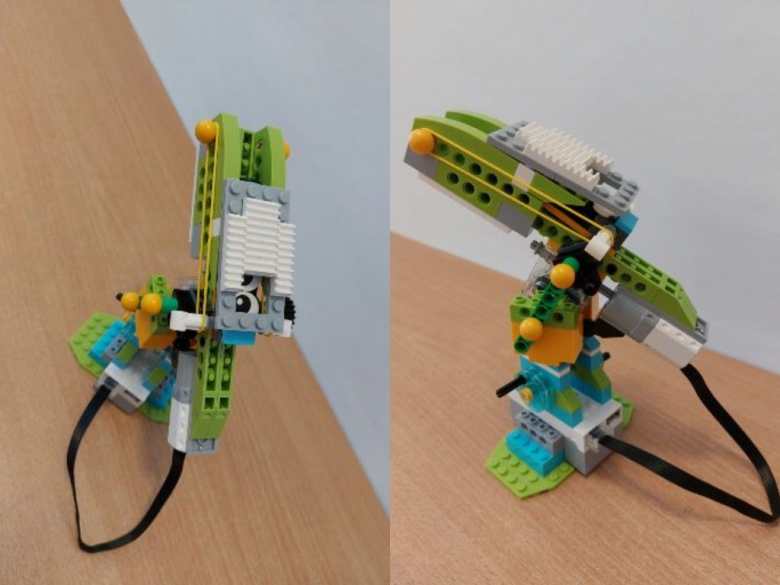
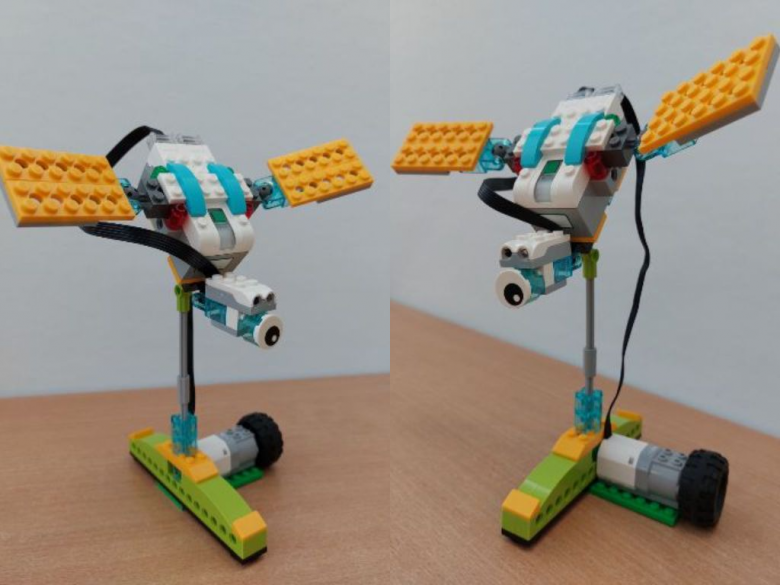
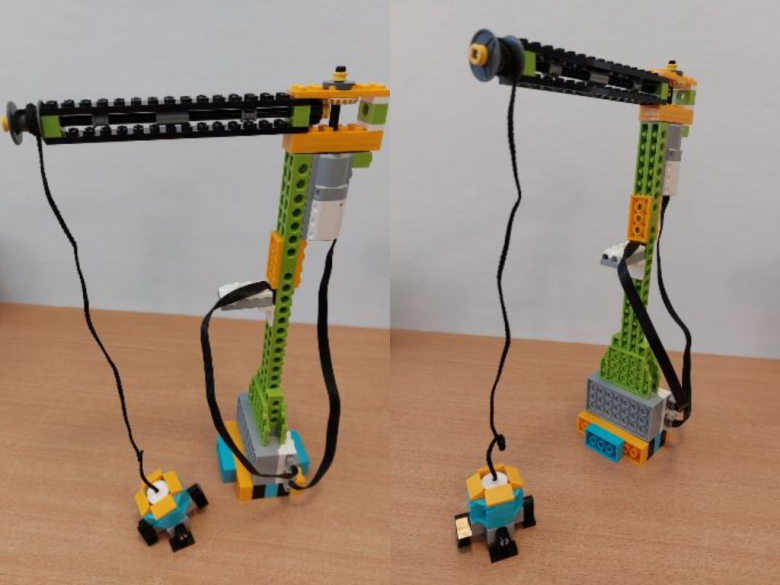
Другие работы